Строим небольшой квадрокоптер для фото-аэросъемки на контроллере Crius All In One Pro v2.0
- Цена: 64.99
- Перейти в магазин
Всем привет, это снова я :)
После написания статьи про новую экшн камеру BosCam HD08A mysku.club/blog/china-stores/23148.html где я описывал что купил ее для фото-аэросъемки с квадрокоптера, меня засыпали в коментах, и и в личке вопросами по моей комплектации коптера, и какое я оборудование использую.
Ну раз многие оценили мою статью, решил поделиться своим рецептом как готовить коптера. Статья будет написана в расчете как на новичка, так и на бывалого для обмена опытом, но разжевывать в какую сторону крутить винт, или где плюс минус не буду.Так как тема очень обширная, и за раз тему всю не расписать, я решил статью поделить на несколько частей, раз в неделю буду дописывать новую часть, а так же корректировать и дополнять уже написанные с учетом вопросов и пожеланий от читателей.
План таков:
1 часть-комплектующие, сборка, прошивка и настройка коптера.
2 часть-комплектующие, сборка, программирование и настройка компонентов минимального набора для фото-аэросъемки.
3 часть-комплектующие, сборка, прошивка и настройка полного комплекта для FPV полетов, и визуального мониторинга по видеоканалу.
Может третью часть разделю еще на две, уж больно обширная тема…
Сразу скажу, для сборки по моему рецепту, вам понадобится хотя бы минимальные знания в программировании, умение крутить отверткой и паять паяльником. Если хоть один пункт вас смущает, или вы не уверены в своих силах, советую взять готовое решение типа этого: ТЫЦ
и ждать его обзора от меня, так как я его уже заказал:)
Закупать советую на сегодняшний день на banggood, я пол года уже только у них отовариваюсь на хобийную тематику, после того как хобикинг кинул своих постоянных клиентов, у них почти все есть, плюс бесплатная доставка.
И так, главная задача для меня, а для многих тяжелый вопрос: как собрать коптер максимально из доступных и качественных комплектующих, да и еще при этом получить максимальный функционал и надежность.Мой ответ:
Рама: можно собрать самому по старинке, а можно купить, тем более сейчас она стоит копейки: ТЫЦ
купите даже две, чтоб были запасные лучи, так как для новичка поломанные лучи обычное дело, а купить у нас отдельно это в тридорого.
Моторы: вопрос который требует серьезного подхода.Я советую брать SunnySky
Это цена-качество, если под акумы 3S то эти
если под 4S то эти
Регуляторы: 3S Тыц 4S ТЫЦ (выбрать при покупке 40А )
брать только их, так как они уже прошиты коптерной прошивой SimonK, это вас избавит от лишних танцев с бубном с перепрошивкой обычных регулей…
Аккумуляторы: 3S 4S
хорошие акумы, нормально держат ток, лучше турниги нано будут.И не забываем купить сигнализатор разряда батареи: ТЫЦ
Зарядное, для тех у кого нет: самый простое и и надежное:ТЫЦ
Пропеллеры: на первое время взять четыре пары: ТЫЦ весело ломать, дешево менять :) Позже надо будет брать серьезней: ТЫЦ
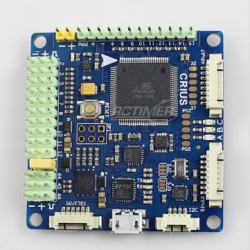
Ну и самое главное мозГ: мой выбор это Crius All In One Pro v2.0 который будет прошит прошивкой Megapirat
его плюсы это конечно огромный функционал и возможности, самые современные датчики на борту, при самой низкой цене.Минус для многих: не летает из коробки, нужны минимальные знания в программировании, и долгая настройка, но поверьте все эти труды того стоят! Тем более я постараюсь разжевать что куда тыкать на русском и понятном языке.Минимальный набор для этого мозга это GPS модуль, хотя и без него можно первое время если не хотите сильно тратится
А для полной комплектации будет еще нужна радиотелеметрия.
ОСД, датчик тока
Ну и обязательно для легкой установки на раму, и защиты контроллера от вибраций это
Для тех кто хочет углубиться в познания этого контроллера, прошу курить форум, всем будет полезно forum.rcdesign.ru/f123/thread283798.html
Или советую взять вот такой комплект: ТЫЦ
думаю я его закажу, и в следующей статье подробно расскажу по его програмингу…
Это все, по минимальной комплектации коптера.Если у кого нет и аппаратуры, берите эту
это тоже самое что и Турнига 9Х.Плюсы этой аппаратуры: возможна глубокая модернизация, возможность прошивки, установка более лучших РСмодулей, и цена конечно.
Ну и даю ссылки на комплектующие которые будут нужны в дальнейшем для полного фарша вашего дрона, для тех кто решил сразу закупится, и собирать следя за статьей:
Подвес для камеры: вариантов очень много, просто на бангуде наберите gimbal и выбирайте, есть которые работают из коробки, есть те которые надо настраивать и программировать, я буду рассматривать ниже такой вариант: ТЫЦ дешево и сердито.
Видео передатчик :этот или брать мощнее если хотите летать дальше чем 300-400 метров. И приемник этот
Видеомониторинг,(то есть чтоб видеть все с камеры коптера) тут все сложнее конечно…
Если вы хотите окунуться в FPV полеты то вам нужны видеоочки, самый дешевый и простой, чисто на попробовать: ТЫЦ но разрешен6ие слабенькое, и яркость не очень.Из получше и подороже ТЫЦ
Ну а если квадр для фотоаэросъемки, то лучше монитор, так как можно и визуально наблюдать за коптером, и смотреть что снимаешь.Лучший вариант: ТЫЦ и не надо будет покупать видео приемник, так как он уже встроенный в монитор.
Хорошее крепление под мониторна пульт, если кто хочет готовый купить
Кто будет строить первый свой квадрик, и для людей кто вообще первый раз будет держать стики пульта в руках, советую купить маленький квадр для учебы, например: banggood.com/JXD-388-2_4G-4CH-6-Axis-Gyroscope-RC-Quadcopter-With-4-Lights-RTF-p-912240.html ну или симулятор banggood.com/20-In-1-USB-Simulator-For-RC-Realflight-G6_5-Phoenix-4_0-XTR-VRC2-FMS-p-89810.html в любом случае вам это выйдет дешевле чем ремонтировать квадр после краша.
1-ая Часть
Нус, начнем. Рама:




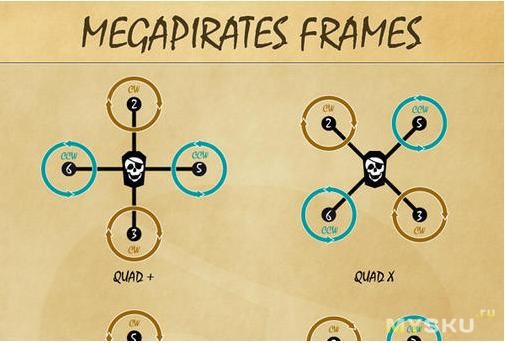
Тут все просто, собираем( но обязательно все винты перед вкручиванием в раму смазываем любым автомобильным герметиком, иначе все по откручивается), прикручиваем моторы, припаиваем к регуляторам таким образом чтоб направление вращения было как на картинке (второй вариант)
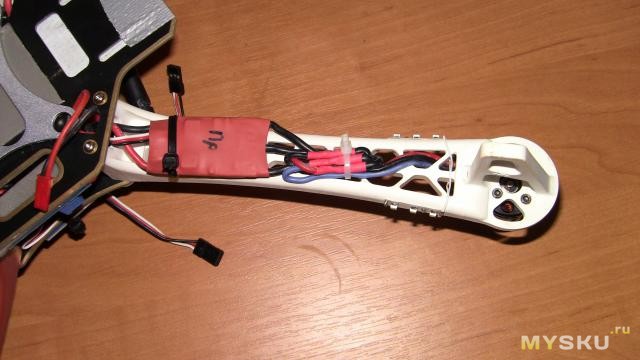
цепляем регуляторы, укладываем провода, не забываем припаять все регули к разводке на раме, и обязательно лакируем пайку, можно лаком жены как я :)

Провода от мотора до регулятора сильно не укорачиваем, а складываем и стягиваем стяжкой, в случае краша если отлетит мотор то не вырвет провода с мясом, они просто распрямятся, так что не переусердствовать с затяжкой проводов
Далее очень важный момент, это балансировка моторов.Хоть SunnySky с завода отбалансированы, но все равно требуют баланса. Способов много, я делаю так: ставлю на планшет программу Seismos а далее делаем по видео инструкции когда вибрации у мотора не сильно большие, я просто беру раму в руку, и попеременно наклеиваю на каждую сторону мотора маленький кусочек скотча, и на ощупь определяю место баланса, но тут нужен опыт.
Далее баланс пропов, кто ни знает как, на ютюбе кучу примеров и купить балансер
А теперь самое интересное, подключение и программирование полетного контроллера.
Вот как выглядит наш красавец:

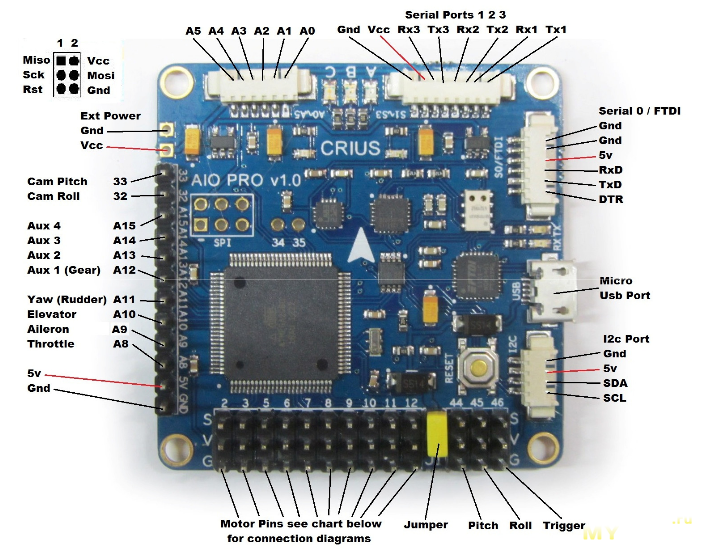
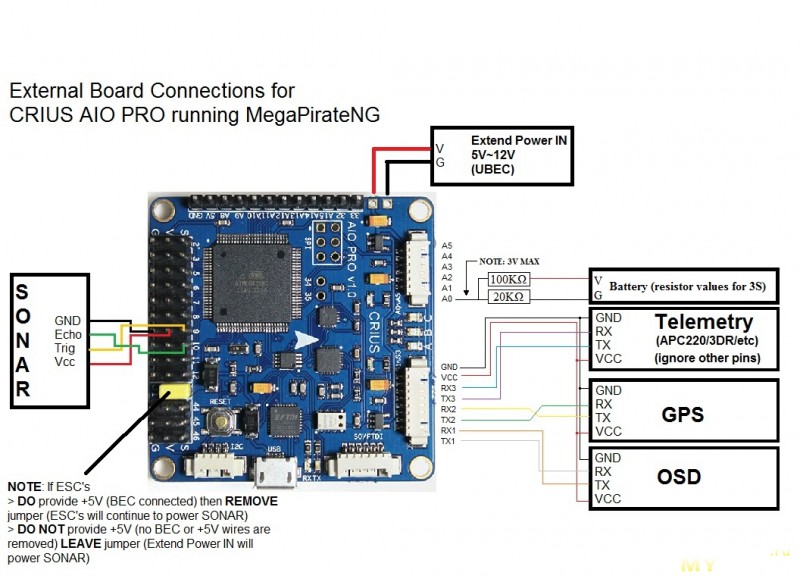
С подключением телеметрии, ГПС, и ОСД все просто, делаем все согласно инструкции:
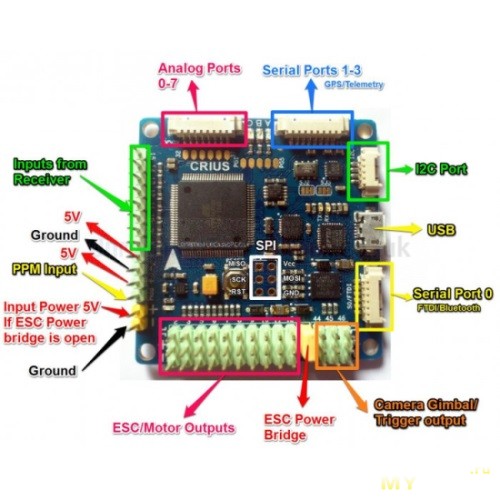
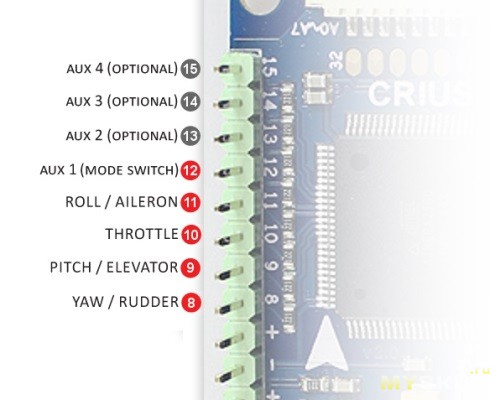
SC/Motor Outputs — сюда подключать регуляторы
Inputs from Receiver — сюда приёмник
Под контактами для приёмника находиться для него питание 5в.
Стрелки указывают где вход, а где выход.
Но в самом начале нужен USB, который справа. Через этот разъём будем прошивать.
Раньше я всегда прошивал с помощью Arduino IDE способ требует умения, правки кода под себя, в общем не из легких для новичка, его описывать все таки не не буду, а то много вопросов ко мне будет…
А недавно появился FlashTool, с ним все очень просто, качать тут Качаем дрова. Для windows 7 эти Потом в свойствах устройства (в диспетчере устройств) выставляем скорость порта 115200 и запоминаем номер порта на всякий случай, например COM3, COM4 или какой у вас получился новый…
С FlashTool качать прошиву не надо, он сам найдет новую и прошьет:
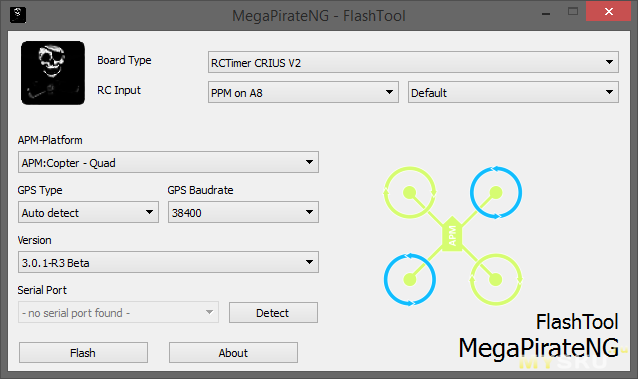
В верхней строчке выбираем вариант платы, в нашем случае из бангуда это RCtimer CRIUS 2
Под строкой слева вариант сигнала с приемника управления, выбираем Regular PWM inputs A8-A15 для обычного приемника.
В APM-Platform выбираем Quad
В гпс ставим UBLOX если вариант модуля как я указал, скорость не трогаем.
Ниже версию прошивы выбираем.
Номер порта под которым у вас определился мозг.
И жмем Флэш.
Теперь нужно проделать основные настройки в программе Mission Planer, это калибровка компаса, акселерометра и радиоуправления.
Качаем Mission Planer После установки предложит обновиться. Обновляем.Первым делом указываем COM порт и скорость 115200, жмём CONNECT

если правильно появится окно загрузки
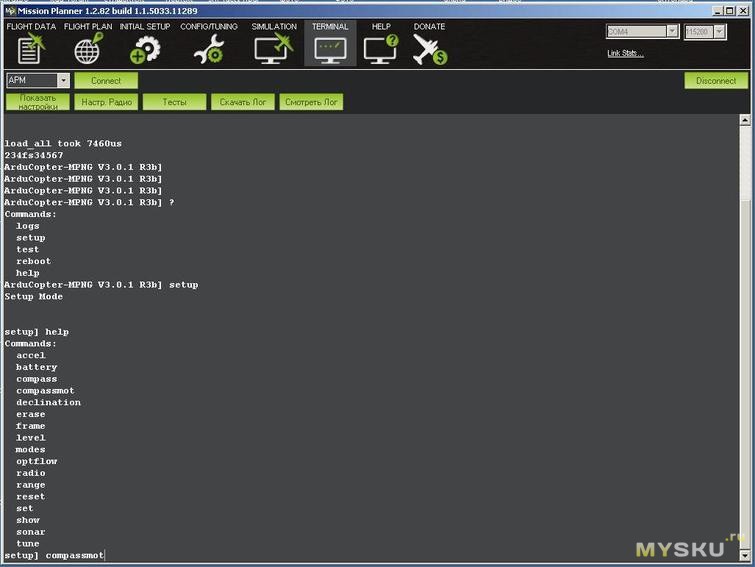
Перед калибровкой датчиков рекомендуется очистить EEPROM. Это память, куда сохраняются настройки (значения переменных). Для этого идем в Терминал, жмем коннект, пишем в поле Setup, потом Erase. После стирания ЕЕПРОМа можно идти калибровать датчики.
Идем на вкладку «INITIAL SETUP», далее «Mandatory Hardware» (во вкладке «Install Firmware» — ничего не нажимаем, а то прийдется снова прошивку загружать, сразу в Compass (Frame Type у нас уже выбран и залит в контроллер) — будем калибровать компас (магнетометр). Для этого ставим обе галочки Compass — Enabled (активирован) Жмем кнопочку Live Calibration. Далее программа нас предупредит, что в течение 60 секунд надо будет вращать наш квадрик, по всем осям.
1) два полных оборота в горизонтальной плоскости, как стоит квадрик по часовой стрелке
2) два полных оборота в горизонтальной плоскости, как стоит квадрик против часовой стрелки
3) поворачиваю квадрик левым боком вниз, и кручу два полных оборота в горизонтальной плоскости, по часовой стрелке
4) кручу два полных оборота в горизонтальной плоскости, против часовой стрелки
5) выравниваю квадрик назад, поворачиваю его правым боком вниз, и кручу два полных оборота в горизонтальной плоскости, по часовой стрелке
6) кручу два полных оборота в горизонтальной плоскости, против часовой стрелки
7) выравниваю квадрик назад, поворачиваю его носом вниз, и кручу два полных оборота в горизонтальной плоскости, по часовой стрелке
8) кручу два полных оборота в горизонтальной плоскости, против часовой стрелки
9) выравниваю квадрик назад, поворачиваю его носом вверх, и кручу два полных оборота в горизонтальной плоскости, по часовой стрелке
10) кручу два полных оборота в горизонтальной плоскости, против часовой стрелки
11) переворачиваю квадрик пузом вверх, и кручу два полных оборота в горизонтальной плоскости, по часовой стрелке
12) кручу два полных оборота в горизонтальной плоскости, против часовой стрелки
Ну асли подключили радиотелеметрию, то удобнее делать так www.youtube.com/watch?v=-_mjfPlHL9o
Про настройку и подключение телеметрии писать не буду, все написано до меня, просто читаем code.google.com/p/apwikitest/wiki/3DRadio
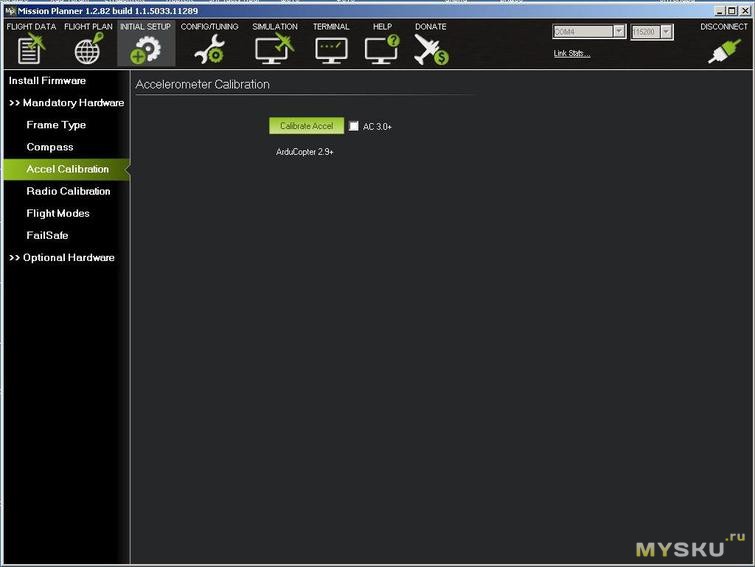
Далее будем калибровать акселерометр. Нажимаем Accel Calibration,, нам по очереди будут даваться команды, а мы их должны выполнять. Команды будут такие:
1) Поставьте на левый бок. Ставим квадр на левый бок (левыми лучами вниз) — подпираем чем-нибудь или просто неподвижно держим руками, ждем следующей команды.
2) Поставьте на правый бок. Ставим квадр на правый бок (правыми лучами вниз) — подпираем чем-нибудь или просто неподвижно держим руками, ждем следующей команды.
3) Поставьте носом вверх. Ставим квадр на «попу» (задними лучами вниз) — подпираем чем-нибудь или просто неподвижно держим руками, ждем следующей команды.
4) Поставьте носом вниз. Ставим квадр «мордой вниз» (передними лучами вниз) — подпираем чем-нибудь или просто неподвижно держим руками, ждем следующей команды.
5) Поставьте его задом)))) Ставим квадр «на голову» (шасси вверх) — подпираем чем-нибудь или просто неподвижно держим руками, ждем следующей окончания мучения.
Результатом может быть надпись Calibration failed — неуспех. Значит ослушались мы командира. Выход один — читаем внимательно бусурманские команды и выполняем их, пока не получим сообщение «Calibration succesful». После этого, на первой вкладке FLIGHT DATA — горизонт и крен/тангаж должно отражаться корректно при наклонах квадрика. (некоторые путаются, когда квадр лежит передом к монитору, кренят квадр на правый бок, в мониторе заваливается на левый — ааа, что делать?))))) — ВСЁ ПРАВИЛЬНО, ТАК И ДОЛЖНО БЫТЬ.
Теперь калибровка радио. В мегапирате есть такая прикольная и удобная штучка. Выводим все тримы (можно и субтримы) в нули, и щелкаем на кнопку «Calibrate» (она будет вместо кнопочки «Completed» — на скрине я уже провел калибровку). Нас программа предупредит, что все стики надо перемещать в максимальные позиции. Жмем ОК, и крутим всеми стиками по максимальным позициям как вверх так и вниз, жмем кнопочку ОК. Далее программа нам скажет, что надо поставить все стики в середину, а газ в минимум. Делаем так и жмем ОК. Всё. Конечные точки настроены. На пульте не крутим конечные точки, иначе опять надо так же перекалибровывать.

К верхнему скриншоту нужен ещё один комментарий. Видите на канале 5 тоже чего-то откалибровано? Это я повесил переключение полетных режимов. Теперь у меня трехпозиционный переключатель — это первые три полетных режима (смотри скриншот ниже), тумблер «Gear» (который над тренерским) — это «сдвиг» трехпозиционного переключателя на три других полетных режима. Как это сделать для Турниги 9.х, можно почитатть на этом бусурманском сайте. flitetest.com/articles/Turnigy_9x_and_Arducopter_flight_mode_setup
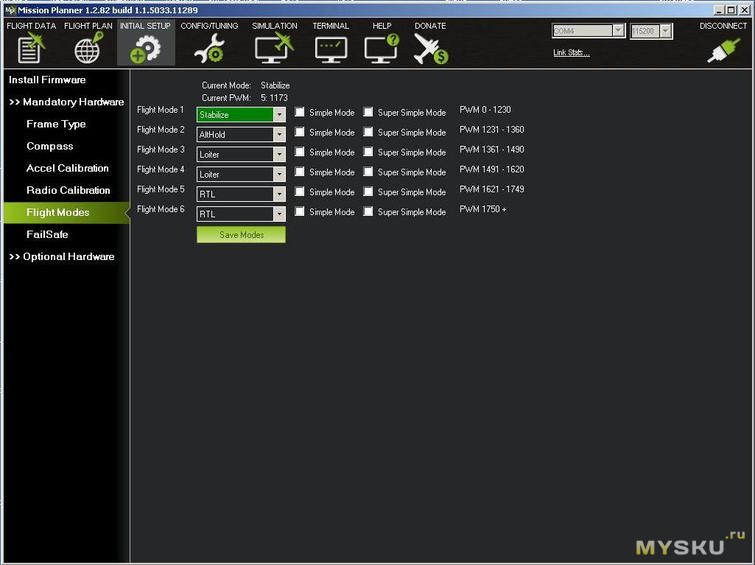
На следующей вкладке Flight Modes — можно определить полетные режимы в удобном нам порядке. Не забыть нажать Save Modes.
Вот в общем-то и всё — самое важное сделано. На первой вкладке, в разделе «действия» мы можем задать квадрику точку GPS «дом» (куда он может вернуться при пропадании связи.ю если есть и настроен фэйлсейф), можем задать «нулевую высоту», на вкладке FLIGHT PLAN — можно задать план полета, просто натыкав точек GPS на карте. (не пошлите квадрик случайно в Китай обратно:) Если вдруг у вас квадр в полете ломанулся на непонятную GPS точку — не паникуйте, переключите полетный режим на один из ручных!

Не забудьте перед полетом, после любых операций с настройками пульта или после калибровки радио в МП, нужно откалибровать регуляторы оборотов на новые значениения газа. Делается это как обычно. Включаем пульт, газ на максимум, включаем борт регуляторы должны встать в режим программирования.Чтоб потом не забыл, обязательно приклеить кусочек пароллона на бародатчик
 иначе высоту коптер держать не сможет, датчик чувствителен к свету и завихрениям воздуха.
иначе высоту коптер держать не сможет, датчик чувствителен к свету и завихрениям воздуха.На сегодня все, устал писать пол дня, в конце недели напишу о настройке Пидов коптера.
Ставим плюсики кому интересна статья, ждем обновление и дополнение к ней, следим…контролю ваши вопросы, все про что забыл допишу:)
Дополнение от 02.03.2014
Настройка PID коптера
Вот сейчас будет очень нужна радиотелеметрия, так можно все настраивать и проверять в реальном времени.Через юсб конечно тоже можно, но для настройки любого параметра придется постоянно втыкать шнурок юсб и конектится, лично мне это сильно надоедает :)
Все настройки Пидов делается в уже известной нам программе Mission Planner, что такое Пиды? Если не знаем, или хотите познать Дзен пидов вам сюда en.wikipedia.org/wiki/PID_controller
Я же все объясню на пальцах, и на русском.
Заходим сюда как на моем скрине:
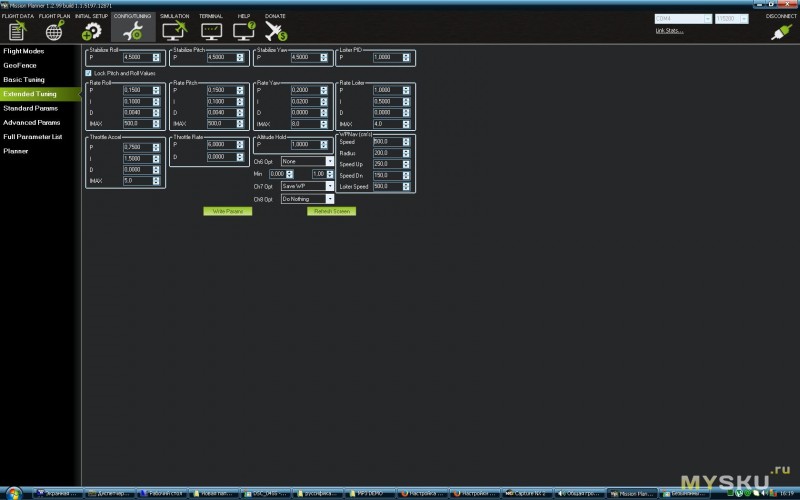
Настройку Пидов надо начинать в режиме Stabilize. Если Квадрик не полетит корректно в Stabilize ОН НЕ ПОЛЕТИТ нормально ни в одном другом режиме
— Сначала начните с дефолтных настроев (настройки по умолчанию). Вы не должны сразу сильно менять настройки от дефолтных.
Для нормального полета, самый главный параметр о котором бы должны «позаботиться» — это Rate Roll P setting.Повышая это значение делаете коптер более «агрессивним» в полете. Понижая это значение Вы получаете более «мягкий » отклик.
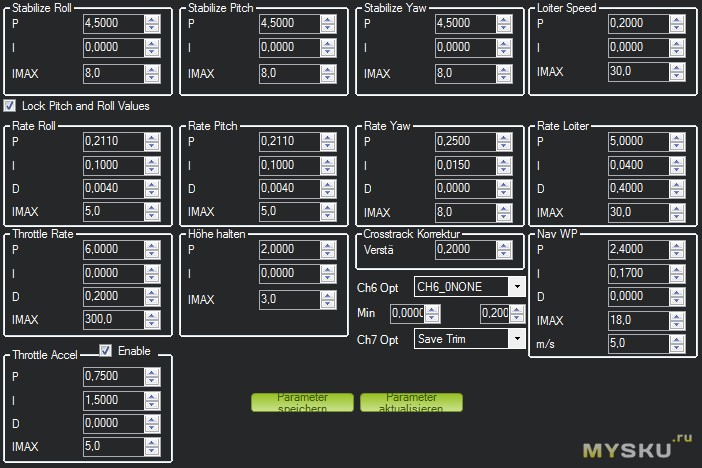
Вот пример: по умолчанию значение Rate Roll P — 0.1400. Это значение оптимально для стандартного Jdrones/3DR квадрокоптера с 850 моторами и 10" (10 дюймовыми) пропеллерами.
Однако если Вы используете большие чем 850 моторы и 12 дюймовые пропеллеры, которые более мощные, то такие значения Rate Roll P будут слишком агрессивные и Ваш квадрик будет казаться довольно неустойчивым. Так в этом случае понизьте ваши значения Rate Roll P до 0.1000 или 0.0900, и вы должны увидеть более стабильный полет.
То же самое верно и для удержания высоты — Altitude hold. Throttle Rate P нуждается в корректировке, чтобы получить оптимальную производительность по высоте.
Эти 2 параметра нужно подбирать, чтобы заставить ваш коптер хорошо отрабатывать, и сильно зависят от соотношения тяга/вес вашего коптера. Больше тяги — меньше значения.
Вот вам примеры когда и что изменять в пидах:
Мой коптер раскачивается медленно (большие движения) когда стабилизировался: понизьте значение в Stabilize Roll P.
Мой коптер раскачивается быстро (мелкие движения) когда стабилизировался: понизьте значение Rate Roll P.
Мой коптер становится шатким при быстрой посадке. Поднимите значение Rate Roll P. Не всегда получается — зависит от пропов.
Мой коптер слишком вялый: Понимите значение Stabilize Roll P. Это значение заставляет коптер быстрее реагировать на угловые ошибки.
Мой коптер крутит вправо или влево на 15 °, когда я взлетаю: Ваши моторы установлены не прямо или Регули не откалиброваны.
В LOITER мой коптер постоянно промахивается.
Попытайтесь увеличить Nav_P. Вы можете также понизить I, потому что в некоторых случаях Nav_I или Loiter_I могут причины промахиваться. Сделайте I равным 0 в безветрие – это лучший способ настроить Nav_P.
Мой коптер все более и более качается вверх и вниз в ALT HOLD.
Ваш THROTTLE_P слишком высок или низок. Вы не нуждаетесь в высоком P, чтобы удерживать высоту. Думайте, сколько Вы перемещаете дроссель, чтобы держать высоту отлично. Не очень много! Это – то, что Вы нуждаетесь в P, чтобы сделать. I будет расти, поскольку Ваша батарея понижается, чтобы составить различие.
Коптер вращается ПО или ПРОТИВ ЧАСОВОЙ СТРЕЛКИ.
Настройте магнитное склонение компаса, пока коптер не прекратит кружиться.
Ну и более подробнее про каждое значение в Пидах:
STABILIZE_P: скорость поворачивания (реагирования), с которой Вы хотите, чтобы реагировал коптер. Чем выше тем быстрее коптер будет пытаться достичь желаемой позиции.
STABILIZE_I: Используется для учета изменений CG (кто знает что это такое), слабые двигатели или постоянные внешние силы.
STABILIZE_Imax: Максимальное количество, что коптер может компенсировать эти несбалансированные силы.
RATE_P: самый важный параметр! Его значение контролирует, сколько тяги нужно выводить для достижения желаемой скорости вращения.
Большая тяга (мощные двигатели) или большой вес коптеров потребуется меньшее значение RATE_P, меньшая тяга / вес потребует более высокое значение.
Слишком высокие значения будут вызывать колебания около 5-10Гц. Вам нужно, чтобы это значение было несколько ниже, чем значение, котороя вызывает колебание.
Агрессивный тюнинг можно получить вернув ровно на 1 от значения перерегулирования. Используйте CH6 настройки для регулировки в воздухе для лучшей производительности.
RATE_I: Используется, чтобы помочь коптеру достичь желаемого крена. Не используйте значение по умолчанию, как это может быть очень трудно настроиться должным образом и может ввести в заблуждение.
Если вы только начинаете, установить этот параметр в 0.
RATE_IMAX: максимальное количество Rate_I, которые могут накапливаться. Также не используйте по умолчанию. Имея в 0 IMAX сделает Rate_I совершенно неэффективными, независимо от того, насколько высок Rate_I.
YAW используется для положения под определенным углом рыскания. Если ваш коптер хочет крутиться, естественно, вы не сможете задать точное направление.
Вы будете дрифтовать, а не поворачивать на несколько градусов, пока P получится значительно высоким, чтобы остановить вращение.
STABILIZE_YAW_P: Заданная скорость, с которой вертолет повернется к нужному направлению. Если он слишком высокой, это может вызвать колебания.
STABILIZE_YAW_I: Действует как триммирование для преодоления плохого баланса коптера. Определяет время, необходимое для достижения максимального значения. Выше = быстрее.
RATE_YAW_P: Используется в качестве контролирующего органа AC2 можно использовать для достижения нулевой скорости рыскания. Если он слишком низкий, вы никогда не будете в состоянии остановить вращение. Если он слишком высокий, вызовет колебания рыскания.
RATE_YAW_I: не используется
Throttle Rate используется чтобы ослабить коптер и контролировать скорость подъема.
Throttle Rate P: количество газа на выходе используется для изменения скорости подъема.
THROTTLE_I: компенсирует ошибки в достижении желаемой скорости подъема (ноль по умолчанию. мы используем Alt hold делать большую часть работы.).
THROTTLE_IMAX: Количество Throttle_I мы можем добавить или убрать для достижения желаемой скороподъемности.
Все это конечно очень коротко о пидах, но поверьте не так все сложно если будите следовать по моей инструкции в начале этого дополнения.
Пишите что еще хотите знать о настройках, следующие дополнение к статье в Воскресение.
По возможности стараюсь каждому ответить кто мне пишет, но вас стало так много что быстро каждому ответить уже не могу, так что без обид :)
Дополнение от 06.04.2014
Сегодня я напишу про полетные режимы MegapirateNG.
Режимов у Мегапирата аж 12, но одновременно настроенных на пульте управления максимум 6, но этого хватает.Если использовать радиотелеметрию и ноутбук, или планшет с Mission Planner, то все режимы доступны.Настройка режимов производится в MissionPlanner, заходим в это меню:
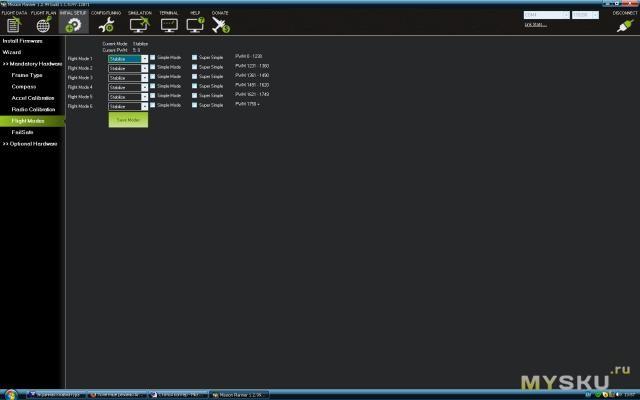
В первом столбце мы выбираем режимы:
Stabilize-основной режим для полетов на коптере, в этом режиме как я писал выше производятся все первые настройки.
Stabilize Mode автоматически выравнивает коптер по горизонту и удерживает текущее направление, также полетный контроллер всегда первоначально должен быть установлен в Stabilize режим, чтобы быть в состоянии армить (запускать) ESC регуляторы моторов перед взлетом. ЧЕНЬ ВАЖНО иметь возможность легко и быстро переключить мультикоптер обратно в Stabilize режим из любого другого полетного режима, чтобы восстановить управление над квадрокоптером (мультикоптером) при любом неожиданном или нежелательном его поведении в полете.
Acro-‘этот режим называеться «Полет без мозгов» Acro Mode это прямое ручное соединение между управляющими стиками аппаратуры и электромоторами коптера,
Режим требует непрерывного манипулирования стиками, как в управлении обычным вертолетом или коптером без электронного контроллера, для аэросъемки нам этот режим не нужен, это только для продвинутых для 3D пилотожа
Alt Hold –очень нужный для нас режим, это режим удержания высоты по барометру.
Перед включением этого режима надо на несколько секунд зависнуть, а после можно стиком газа корректировать высоту, но коптер очень плавно и вяло будет на него реагировать.В этом режиме хорошо вести видеосъемку с коптера, но очень важно не садить коптер в этом режиме! Перед посадкой опять возвращаем в Stabilize/
Auto mode-Режим для полета по точкам, и заданном режиме в MissionPlaner

Сценарии миссии может быть просто набором точек маршрута или очень сложных действий таких как, взлет, быстрое вращения заданное число раз, фотоснимок и т.д.
Есть два способа войти в Автоматический режим: (В воздухе) или (На земле).
— на земле:
Если Вы собираетесь использовать Автоматический режим, чтобы взлететь от земли, специальный скрипт безопасности предотвращает выполнение сценария миссии до того пока, Вы не сделаете арминг (запуск) моторов и затем впервые нажмете стик газа (взлетите).
• Это должно предотвратить Ваш коптер от самостоятельного взлета, при случайном щелканьи переключателем режимов.
• При использовании Автоматического режима для взлета от земли Ваше самое последнее значение газа Alt_hold режима используется в качестве основания для управления газом.
• Как только коптер взлетел, он направится к первой целевой высоте и начнет следование сценарию миссии.
— в воздухе:
Переключение на Автоматический режим, когда Вы (ваш коптер) уже находитесь в воздухе, заставит Ваш коптер лететь к Вашей первой целевой высоте и начать следование текущему сценарию миссии.
Как только сценарий миссии закончится, коптер не будет лететь домой.
• Он будет просто cлоняться (Loiter) в последнем положении сценария, пока Вы не восстановите управление через переключатель режимов.
• Если Вы хотите, чтобы Ваш коптер летел домой, Вы можете добавить команду RTL в конце Вашего сценария миссии.
• Если Вы хотите приземлиться вручную и отключить двигатели (а не выполнялась автоматическая посадка с предопределенной командой), Вы должны переключиться в, Stabilize режим, и приземлить коптер вручную. (За исключением следующего — Вы не можете приземлиться вручную ни в каких автоматических режимах, так как стик дросселя в автоматических режимах (Alt Hold например ) управляет высотой, а не двигателями непосредственно. )
• RTL или АвтоПриземление, добавленные в конце сценария миссии смогут приземлить коптер и отключить двигатели.
Настройка автоматического режима:
Наборы значений Waypoint_Speed — скорость перемещения между точками маршрута.
• Скорость по умолчанию между точками маршрута составляет 6 метров в секунду.
NAV_PI используется, чтобы поддержать желаемый темп перемещения коптера между точками следования.
• NAV_P используется, для наклона коптера, чтобы достигать желаемой скорости,.
Чем выше P, тем больше коптер наклоняется.
• Nav_I используется, чтобы дать компенсацию внешних сил, которые заставляют коптер не отклоняться от желаемой величины.
Высокое значение I, наращивается и уменьшается быстро, чтобы держать желаемую величину.
Guided Mode — направляемый режим квадрокоптера: клик по карте лети сюда, лети туда…
Работа Guided задается кликанием на карте в программе Mission Planner.
• Как только точка достигнута, коптер будет болтаться в этой точке, ожидая следующей команды.
• Любое число команд можно отправить, чтобы в интерактивном режиме управлять коптером.
Главное сначала взлететь в Stabilize, а потом включать этот режим.
Режим Loiter – коптер удерживает заданную точку и высоту.
Местоположение Loiter может быть вручную отрегулировано стиками управления.Если коптер плохо держит местоположение, выше про настройку пидов, я уже писал как настроить пиды в этом режиме
Return to launch mode (RTL) – Важнейший режим, этоавтоматический возврат квадрокоптера домой. Если переключить на RTL режим, коптер будет:
• поднимется на минимальную высоту 15 м.
• повернется и вернется к дому (точке взлета и GPS определения)
• зависнет выше дома в течение 5 секунд
• спустится и зависнет в 2 м. или приземлится, если RTL инициирован Failsafe (потеря сигнала от передатчика)
Настройка режима:
RTL_ALT: минимальная высота (в см), на которой коптер будет лететь домой. По умолчанию 1500 см (=15m). Если устанавливают на нуль коптер, возвратится на той высоте, на которой летел коптер, когда RTL был призван.
• RTL_LOIT_TIME: после достижения исходного положения, время ожидания(в миллисекундах), перед спуском к RTL_ALT_FINAL.
• RTL_ALT_FINAL: высота выше исходного положения, чтобы висеть до ожидания возврата контроля пилотом, или установить в 0, чтобы автоматически приземляться.
К настройке этого режима надо очень серьезно отнестись, думаю чуть позже я подробнее остановлюсь на этом режиме
.Как вы видите после столбца с режимами, есть окошко для галочки.Эта галочка переключает режимы в Simple Mode
Этот режим позволяет вам «управлять компасом, не коптером» Вы не должны заботится об ориентации коптера, вы просто летите относительно вышей стартовой позиции и положения. То есть если стартовали в позиции коптера «лицом на север» — север всегда будет «вперед» для стика вашего передатчика.
• Simple Mode это не отдельный режим — это модификация других режимов Мегапирата и используется в сочетании с этими режимами.
Думаю на этих режимах можно остановиться, они основные, есть еще несколько, но не думаю что они будут кому то нужны.
Теперь поговорим о том как переключать все эти режимы.
Как я писал они легко переключаться в MissionPlaner в первом окне, если вы конечно используете ноутбук, планшет или смартфон.Но смартфон и планшет должны поддерживать функцию OTG, то есть кто не знает подключение внешних ЮСБ устройств 2.0.Могу даже с вами поделиться какой я нашел самый дешевый смартфон подходящий для этих целей :) Это Fly IQ450 Horizon2 стоит не больше двухсот у.е, или чуть дороже Lenovo P 770-780
Если вы используете только пульт управления, то переключение режимов вы можете повесить на трехпозиционный переключатель, но понятно что только три режима сможите повесить.Хотя на первое время это хватит.Я ранше на переключатель вешал Stabilize,AltHold, и Loiter.А возврат домой был по файселву.
Что делать если вы хотите больше режимов на пульте? Надо не много модернизировать пульт.Вот тут можно купить шестипозиционный переключатель: ТЫЦ

ниже на страничке с товаром даже есть инструкция по замене.Ну или купить эти запчасти на любом радиорынке, по деньгам даже дешевле будет:)
Но этот способ немного не удобен, так как надо проскакивать через несколько режимов, а если переключишь не на то…крашь……
Есть еще один способ, это электронный переключатель
www.youtube.com/watch?v=Dbu1m2m8Eb0 подробнее по изготовлению почитать можно тут Я купил у товарища в Украине уже готовую платку, он заказал их на заводе, мог бы и сам вытравить плату, запрограммировать Атмегу, но это все время а платка стоит у него копейки:)
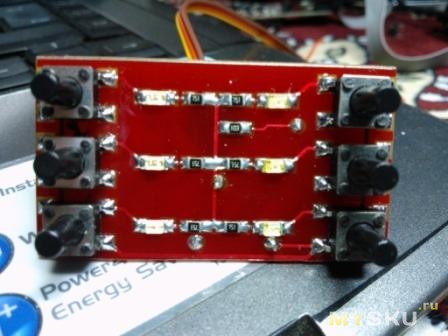
 Буду на днях устанавливать ее,вот фотки по варианту установки от моего товарища.Кому нужна будет такая платка пишите в личку.
Буду на днях устанавливать ее,вот фотки по варианту установки от моего товарища.Кому нужна будет такая платка пишите в личку.Думаю на сегодня ВСЕ… Чем дальше пишу статью, тем больше понимаю что это только начало, и писать еще очень много.Я так думаю что будет много вопросов по настройке режимов, буду дополнять по возможности.
За время написания статьи, я понял необходимость записи видеоинструкций на Ютюбе, по настройке с демонстрацией каждого отдельного раздела.Сейчас много работы, даже на полеты времени не хватает, но в Мае месяце я плотно займусь этим вопросом.И все ваши плюсы и хорошие отзывы очень мотивируют меня :)
Ждем следующее обновление статьи!
В пятницу будет обновление, дополнение будет посвящено подвесу для камеры.Будет подробное описание по программированию контроллера, и настройке подвеса.
Всем большое спасибо за плюсики, сегодня выиграл 25у.е от спонсоров :)
Статью на днях закончу, но закончу ее по окончательным настройкам коптера, так как статья получилась очень большая, и очень много вопросов мне задают…
А наследующей неделе напишу еще одну статью, как бы продолжение, но там будет про настройку подвеса для камеры, и про полное оборудование для FPV полетов.
| +47 |
3599
71
|
Сайт MYSKU.club cоздан для обзоров товаров, заказанных в зарубежных интернет-магазинах AliExpress, Amazon, Ebay и других.
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку.
Если Вы купили что-то полезное, то, пожалуйста, поделитесь информацией с другими.
Также у нас есть DIY сообщество, где приветствуются обзоры вещей, сделанных своими руками.
-
1026.32
Скидки и распродажи

-
445.39
AliExpress

-
273.05
DIY, или Сделай сам

-
187.28
Ebay

-
179.74
JD.ru

-
155.08
Магазины Китая

-
98.02
Новости сайта

-
77.49
Другие магазины
-
71.57
Магазины России и СНГ

-
68.46
TaoBao

-
ResSet → 3Д принтер FLASHFORGE Adventurer 5M за 26320 рублей
-
Sanchela → Набор мини инструмента Kraftool X-Drive 27970-H38 (38шт.): трещотка 1/4", биты, торцевые головки, переходники
-
titansuperhero → Обзор Gan зарядного устройства UGREEN X763 (CD373 P/N 25095), с мощностью 160Вт
-
and361 → Гейзерная кофеварка Pedrini как бюджетная альтернатива Bialetti
-
titansuperhero → LED лампа-стробоскоп от Chromex. Что ты такое?
-
Ant122 → Модернизация мультиметра: вместо "кроны" питание от аккумулятора старого смартфона.
-
Monter → Прибор для измерения сопротивления аккумуляторов (миллиомметр) YR1035+ из РФ (3975 ₽)
-
RONIN → Новая жизнь сверлильного станка. Делаем удобное управление
-
vovoshka → Доработка зарядного устройства Liitokala lii-402 с type-C входом
-
carmusic → Паяльник на 60Вт с керамическим нагревателем и регулировкой температуры, по акции за 189р. Небольшой обзор с разборкой.
взлет-полет-возврат-посадка без пилота?
Можно строить любые маршруты, с разной высотой на разных точках, автомат взлет, автомат посадка, возможности не ограниченны :)
так же?
начиная с
?utm_source
и до конца ссылки.
Не то, что меня это как-то напрягает — просто ссылки будут читаться гораздо приятнее, будет меньше мусора.
Спасибо за статью.
Если они копеечку приносят — то не вопрос, пусть будут.
В начале статьи есть битая ссылка:
h ttp://
Вообщем спасибо за статью, опять захотелось достать его со шкафа. Надеюсь аккумы еще живы :)
И пара вопросов:
Стоит заказать жпс? лучше контролит высоту? Так как в управлении полный ноль, хочется что бы была возможность включить автопилот и пробовать заново))
Я так понимаю, пират сейчас получше мультивия?
Чтоб по барометру держал хорошо высоту, надо поролон приклеить на датчик, он чувствителен к свету, и завихрением воздуха.
кстати я так и не нашел чем отличается вторая версия AIOP от 1.1
нашел. Добавлена память для логов — несущественно
Отличается первая версия от второй бародатчиком, и разводкой питания.
У Вашей рамы есть существенный минус — она просто дико тяжелая.
Почти закончил сборку на почти такой же раме, только без распайки платы, всё на проводах. Цель постройки коптера — обучение начинающих пилотов. Сделал вывод, что лучше провода на стяжки не крепить — при краше с креплением на стяжках больший шанс выдрать провода с корнем из мотора. В итоге только регули примотал изолентой, а силовые провода заплёл в косичку и пустил вокруг луча.
А для начинателей всё же лучше NAZA Lite+GPS, ИМХО.
Да для начинающих наза лучше, но цена… и малый функционал, а при должной настройке AIOP стабильнее Назы.
ИМХО.
Бери клона АРМ shareasale.com/r.cfm эта версия платы лучше Аиопа в том что компас с платы убрали, и перенесли на плату ГПС модуля, точнее теперь работает и меньше наводок от силовых проводов.Я себе буду брать версию этой платы, когда получу напишу обзор по настройке и программированию, там тоже есть свои танцы с бубном…
Спасибо за обзор!
Есть ли возможность сделать отдельный подвес для камеры, с отдельным, же управлением? Сколько это может стоить?
Не нашел в статье время максимальное полета.
Можно конечно сделать отдельно подвес, подвес вообще независимый от коптера, у него свой отдельный контроллер, также с пульта управляется камера вверх-вниз.Это будет в следующей части статьи…
Я вообще тсейчас собираю ручной подвес с трехосевой стабилизацией для зеркальной камеры.
А почем обходится аппарат под зеркалку? Детали тоже все покупные? Или не все, но не покупные несложно сделать?
Интересно в какую цену обойдется аппарат под зеркалку, с отдельным подвесом камеры, отдельно же и управляемым. Если самому собирать.
готовый хороший под две штуки баксов выйдет… я впишусь в 700 наверное.
Сам сейчас в раздумьях над контроллером Crius All In One Pro v2.0, APM Flight Controlt Set APM 2.6 или Naza lite + GPS.
форумы почитал, но в каждой ветке все хвалят свое. Как таковых справедливых сравнений найти не удалось.
Интересует ваше личное мнение.
Crius All In One Pro v2.0 и APM по железу не отличаются, у АРМ что хорошо уже вынесли компас на плату с ГПС.Но прошива решает, мегапират у меня лично не зависал еще, а вот АРМ самик разбивал, хотя может я виноват, так как не очень организовал ему фильтрацию питания.А вот АИОП не такой прихотливый к питанию, как мне показалось, по крайней мере я его тупо питаю от бэков регулей, и один конденсатор повесил на разъем, и ему хватает… с АРМ так нельзя…
Наза все таки денег стоит при малом функционале, но летает фактически из коробки.АРМ и АИОП при должной настройке летает лучше НАЗЫ, у них все таки что аксель что компас круче чем у назы…
banggood.com/APM-Flight-Controlt-Set-APM-2_6-And-GPS-And-OSD-And-Radio-Telemetry-Etc-p-920659.html
2.Подскажи пожалуйста по моторам, какое преимущество если летать на 4s батареях по сравнению с 3s. Спасибо!
А, и подвес для камеры у них был дешевле на 10$, или я путаю…
На 4s эффективнее ВМГ
На 10 у.е был дешевле, но без стабилизатора напряжения.Стабилизатор нужен обязательно, с просадкой напряжения будет плыть горизонт…
*Стабилизатор нужен обязательно*- это оно Flight controller: BGC 2.0
ВМГ сокращенно Винто Моторная Группа, под 4S ты ставишь движки менее оборотистые, соответственно уменьшается их аппетит по амперам, а за счет вольтажа ты доводишь обороты до той же тяги как с более высокооборотистыми движками, но при меньшем токе.Если считать по калькулятору, то время полета на моторах 880KV (KV-обороты в минуту на один вольт) на акуме 4s 2200mAh будет грубо ровняться по времени полета с движками 1000KV на акуме 3s 3300mAh который в свою очередь тяжелее на 80-90грамм, да и дороже :)
Еще больше эффективность достигается уменьшением KV при этом увеличивая деметр винта, и увеличивая напряжение…
Сейчас я просчитываю себе гесокоптер под подвес весом 600-700грамм, под фотик NEX, я уменьшил KV моторов до 350оборотов в минуту, пропы 13х5, и акумы 6s.При этом ток висения гексы с подвесом и фотиком, будет чуть больше чем у этого квадра, при грузоподъемности в два раза больше.Ну и время полета будет поболее…
Закинь товары в корзину, и узнаешь цену всего что ты захочешь купить :)
Ориентируюсь на эти статьи, чтоб было понятно:
habrahabr.ru/post/141761/
habrahabr.ru/post/141669/
Просто не могу для себя решить будет ли мне это интересно. С нынешним курсом доллара дорогая игрушка на один раз получается.
Ещё вопросы:
1. Реально ли все это продать потом, если не понравится?
2. Стоит ли возиться с трикоптером или это путь не для новичка? Опять же ориентируюсь на статью на хабре, судя по ней с сервой и поворотным механизмом проблем не так много, а перспектива сложить лучи и закинуть в рюкзак радует.
Вот как раз все проблемы от сервы и поворотного механизма и будут.
спасибо за труды.
Вот думаю купить фрейм:
https://aliexpress.com/item/snapshot/6051657971.html
что скажете? (Плюс в том что стрелы складываются, удобно транспортировать в машине)
Если хочешь раму такого типа то вот banggood.com/MF-YX-YX550-Locust-Quadcopter-Frame-Kit-p-79183.html лучи запасные копейки стоят banggood.com/450-Replacement-Frame-Arm-Parts-For-DJI-F450-Flamewheel-p-76369.html
Из карбоновых рам посоветовать не чего не могу, так я их не использую, дороги в ремонте и по цене.
Я эту хотел купить banggood.com/FPV-Reptile-550-Gimbal-Carbon-Fiber-Alien-4-axis-Airplane-Frame-p-921089.html но жаба…
А вообще можешь брать свою раму, с движками и акумами подскажу под нее…
Ещё не могу понять на сколько та HJ-H4 больше твоего варианта, размеры тупо не указаны, но по весу в два раза больше твоего варианта.
Wheelbase: 550mm — это откуда и куда? (пытался гуглить, но особо ничего не нагуглил)
https://aliexpress.com/item/snapshot/6051657971.html
База — 600мм
470х460х240
Желательно чтобы летал по дольше. (больше 15 минут)
Держи первый рецепт мелкого квадра если под гоупроху без подвеса: моторы banggood.com/Sunnysky-X2204-1800KV-Brushless-Motor-For-RC-Model-p-78200.html под него пропы 7х3.5 акум 3S 2200mAh
время полета с прохой будет около 8 минут, без нее 15.
или такие моторы под восьмые пропы banggood.com/Wholesale-SunnySky-X2204-1480KV-Brushless-Motor-For-RC-Airplane-Quadcopter-p-59938.html
1) Вы пользуетесь ecalc.ch? Там всего несколько моторов SunnySky, везде пишут выберете пункт Custom и вводите любой, но блин не могу найти этот пункт.
2) Если вес без подвеса 850-950гр, то с подвесом получается 1100-1200 или даже чуть больше? Какое время полета в разных режимах данной модели при использовании указанного вами аккумулятора 3S 2200мАч?
3) Как осуществляется отображение радиотелеметрии, вижу порт USB? неужели ноутбук с собой таскать? И какие параметры позволяет отображать связка контроллера и указанного вами OSD?
4) Контроллер кажется может сам управлять двухосевым подвесом, возможно ли использовать подвес без собственного контроллера?
433МГц — радиотелеметрия
2,4ГГц — управление
5,8ГГц — видео
Не много ли? Не будут ли они друг другу мешать?
Но все можно посчитать и без него, так даже точнее будет :)
2.Я использую 4S, время висения коптера до просадки напряжения акума до 3.5Вольт 12-13минут, ниже не советую садить акумы.С подвесом летает от 7до 9минут, в зависимости от активности полета.
3.Радиотелеметрию можно выводить на ноутбук, скачай просто Мисион планер и увидешь зачем тебе он нужен, я хочу планшет сейчас купить для радиотелеметрии, даже смартфон который поддержывает юсб устройства можно использовать, Мисион планер есть и под андроид, просто погугли этот вопрос www.youtube.com/watch?v=NZ9e74bcDEY тем боле я скоро об о всем расскажу.Но не обязательно нужно радиотелеметрию иметь, просто возможностей больше.А так все данные у тебя выводятся и на дисплей вместе с видео, для этого нам и нужна будет эта ОСД о которой писал banggood.com/MinimOSD-MAVLink-OSD-APM-APM2-Flight-Control-Board-p-73436.html выглядит на десплеи все так www.youtube.com/watch?v=Wjh2SUsIfms все данные на дисплеи настраиваются как угодно: Высота, скорость, горизонт, координаты, напряжение акумов, расхд ампер, сколько съело ампер, направление на базу, и много чего другого, об этом все позже, сам видешь какая большая тема, и сколько всего еще писать.
4.Да может управлять, но подвесом на сервах, даже не заморачивайся, это утопия…
С радиотелеметрией через смартфон можно даже управлять коптером без пульта, возможности огромные, можно даже через блютуз телефона, но дальность маленькая совсем.
и ждать его обзора от меня, так как я его уже заказал:)>
Какой полетный контроллер используется в этом конструкторе?
Сам начинал с Gaui 330x, потом самоделы разные, но хочется уже готового из коробки.
Спасибо за вдохновляющие обзоры!
Нетерпится прочитать часть о настройке подвеса.
По баро высоту держать не умеет нормально, автопосадку нормальную не могет, не говоря автовозврат с последующей посадкой, у меня мултиви тупо ронял коптер при автопосадке с двух метров высоты через раз… а как на нем контроллер с ума сходит после нескольких фалсейвов подряд, ммм…
cezarepicentr ответьте пожалуйста на вопросы из сообщения:
сам бы взял такую раму, но итак потратился к новому сезону, а в планах не одна покупка еще.Эта рама хороша для фпв полетов, куча места под начинку, возможность подальше отодвинуть видеопередатчик.Да и крашь карбоновый корпус перенесет, не убив электронику…
-Какие моторы и винты взять под эту раму?
Регуляторы которые ты предлагаешь, будут работать под 4S (30A SimonK Procedure Brushless ESC Input Voltage: (2-3S Lixx red))?
Что за герметик такой волшебный? где брать?
Жаба душит за него полторы тысячи платить
То есть силиконовый герметик достаточно надежно фиксит винты? Фиксация получается в резьбе или под головкой?
https://aliexpress.com/item/item/ATG-TT-X4-12-Reptile-4-Axis-Glass-Carbon-Folding-Frame-Kit-quadcopter-with-Landing-Gear/1566666618.html
Операционка Win7.
За обзор спасибо Все толково разжевано и показано.
Дистрибутив вот на всякий случай выкладываю: yadi.sk/d/rVYObmI6LqKmf
Вопрос: 1. Будет ли работать маленький квадрик JXD-388 предложенный Вами для тренировки, с аппаратурой, предложенной Вами FS-TH9XB?
2. Будет ли работать эта аппаратура с готовым решением Flying 3D X8.
Стоит ли тратиться на аппартуру, идущую с JXD-388 или лучше сразу купить хорошую, а JXD-388 купить без пульта???
2.lying 3D X8 тоже идет со своей апой.Но поставив в него другой приемник от FS-TH9XB будет работать.
docs.google.com/spreadsheet/lv?key=0AtW-OFUfUTMzdF8xLU9QZldMZ2dZQTRxdUpKSlpINWc#gid=0
Подскажите, какая модификация прошивки er9x больше подходит для квадрика? передатчик FrSky без телеметрии.
Такой комплект заказал.
ebay.com/itm/121158845888
Вообще вот по первоначальной прикидке получается такой квадрик.
docs.google.com/spreadsheet/ccc?key=0AtaIdRgLthN8dF91LUVrMDJtMmdfcmhfdGNuRmN3b1E&usp=sharing
По калькулятору, при полном весе в 1400гр с подвесом и камерой в будующем время висения около 15 минут.
rc-calc.com/ru/copter/0nI2GZ
Что скажите? Взлетит? )))
Правда пока еще сомневаюсь АРМ или NAZA Lite. Хочется и функционал и не убить в первый вылет.
Взлетит конечно.С Назой можно тоже убить на раз два :)Главное подойти к настройке серьезно, первый пуск на канатах коротких, потом уже в полет.
А еще вопрос, что делать для увеличения времени полета, кроме максимального облегчения? Читал о понижении kv и увеличении размера винта.
Да уменьшение КВ и увеличение пропов, но на эту раму пропы более 10 не влезут.
Раму эту не буду брать, буду сам делать. Все готовое не хочется брать, руки чешутся самому сделать. Планирую взять рейку деревянную(12 мм) и из текстолита вырезать лобзиком/лазером середину по чертежам.
Если я возьму вот эти моторы, например, и к ним 12'' пропы, то будет лучше или лучше эксперименты оставить на потом, когда уже будет опыт? Судя по калькулятору минуты две-три добавляется.
И чем отличается вот от этого?
Комплекты отличаются приемниками, телеметрийный и нет.Брать нетелеметрийный.
Решил я после твоего обзора приобрЕсть коптер.
Но т.к. на Flying 3D X8 6 Axis 2.4G 8CH GPS FPV RC Quadcopter RTF SKU: SKU123008 жаба пока душит, нормально будет если я закажу Nine Eagles 2.4GHz 4CH Galaxy Visitor 2 RC Quadcopter With Camera?
Как я понимаю запасной аккумулятор и пару комплектов лопастей брать сразу, а новую раму заказать по приходу? :)
Мне нужен не столько FPV сколько возможность записать. Хочу поснимать дачу и избушку у озера у тестя, следовательно нужен какой-то solar powerbank?
А камеру ведь можно потом, когда во вкус войдёшь другую подцепить, разрешением повыше?
А сколько он «груза» может поднять, в том смысле что может батарею больше подвесить?
Моторчики какие-то детские совсем — их хоть заменять-то можно?
P.S. Да вы что!!! Я взрослый состоявшийся мужчина, и… да, мне нужен этот вертолёт! :)
Поделитесь почтой этого товарища? Тоже хочу приобрести такую платку…
Вдохновившись вашей статьей, решил собрать себе квадрик, правда на NAZA Lite.
Заказ сделал в трех магазинах, вот что получилось из этого:
docs.google.com/spreadsheet/ccc?key=0AtaIdRgLthN8dF91LUVrMDJtMmdfcmhfdGNuRmN3b1E&usp=drive_web#gid=1
Теперь с нетерпением жду посылок и буду собирать.
Статью на днях закончу, но закончу ее по окончательным настройкам коптера, так как статья получилась очень большая, и очень много вопросов мне задают…
А наследующей неделе напишу еще одну статью, как бы продолжение, но там будет про настройку подвеса для камеры, и про полное оборудование для FPV полетов.
И еще вопрос про контроллеры Crius All In One Pro v2.0 и APM Flight Controlt
1. Контроллер Crius All In One Pro v2.0 необходимо комплектовать GPS модулем, Телеметрией, ОСД, антивибратором контроллера и датчиком тока. Итоговая сумма этого комплекта составляет 6182 руб.
2. Контроллер APM Flight Controlt имеет весь набор и стоит он дешевле 5250 руб.
У первого контроллера как Вы говорили, очень хорошая прошивка MegaPirate.
Вопрос, у второго контроллера така же хорошая прошивка (по функционалу, стабильности и т. д.)? APM Flight Controlt по сложности прошивки и настройки такой же как Crius или легче?
Тоже собираю квадрик по Вашей схеме, но на другой раме (см. выше) и вот вопрос брать 1-й контроллер или же лучше 2-й? Всё таки он дешевле целых на 932 рубля. И как вы говорили у него компановка лучше чем у Crius.
Напишите пожалуйста своё мнение?
Вопрос следующий аппаратуру FlySky, можно ли купить без стокового модуля и приёмника, хочу сразу купить FrSky 2.4G RF DJT Module two-way V8FR-II HV Receiver Combo Compatible for JR.
Заранее благодарю.
По цене разница не большая будет с модулем или без, лучше взять апу с модулем, а потом свободно его продать на форуме за 30 баксов :)
Все бегу на поле летать, и записывать видео для данной темы с демонстрацией полетных режимов…
9XR поновее, но есть ли у нее преимущества?
А так же Loiter, Auto, но в основном меня больше интересует RTL.
Я знаю, что файлсейф в Turnigy 9x с родным передатчиком не работает, по этому задаю этот вопрос.
Сначала газ тримируешь в максимальный минус, на приемыше нажимаешь кнопку файселва, в мисион планере указываешь этот параметр газа для РТЛ, после тримируешь газ в плюс и производишь калибровку регуляторов, и все…
А вот подскажите, еще. Если я активизирую режим (не помню еще пока все названия), который ограничивает радиус полета и при пересечении этого расстояния возвращается в точку старта. Этот режим тоже будет работать?
Для начала его тогда можно использовать вместо фалсейф.
В обзоре указан датчик тока с bangooda. Вы его подключали к контроллеру? Если да, не поделитесь схемой подключения. Контроллер у меня Crius All In One Pro v2.0
Кста, как сейчас банггуд на Украину товары шлет? И шлет ли?
Жду от автора статью по FPV комплекту.
Andersonda, почему наза, а не апм? Потому — что летит из коробки и с пидами мороки нет? У апм возможностей побольше..
Удачи!
Пока подвес в летит из Китая, занимаюсь слесаркой — делаю раму, Чтобы работа не простаивала, нужны эти размеры. Спасибо, извините.
Большое спасибо за эту статью и видео на Ютюбе. Я хочу собрать недорогой коптер с возможностью апгрейда, если это попрет и позволят финансы. Сначала просто коптер с контроллером APM 2.6, потом добавить FPV. Хотелось бы чтобы время полета с FPV было не меньше 20 минут и дальность 2-3 км, но из предварительных расчетов понимаю, что придется довольствоваться меньшим.
У меня вопрос по поводу расчета времени висения коптера. Выше вы писали:
Я попробовал рассчитать время висения с комплектующими, которые Вы рекомендуете в статье в вариантах 3S и 4S. Данные по аккумуляторам взял с banggood, вес там есть в комментариях, по моторам — из ecalc. Вес рамы и мозгов принял за 440г (280 рама + 150 мозги + 10 про запас). К стати, Вы не мерили, сколько весит весь комплект APM 2.6, а то я взял от фонаря?
3S 2200mAh — rc-calc.com/c/mZu7eG — 11.39 минут, доп. вес 720 гр.
4S 4200mAh — rc-calc.com/c/i6aVS5 — 16.87 минут, доп. вес 779 гр.
3S 4200mAh — rc-calc.com/c/j9e5ok — 18.49 минут, доп. вес 717 гр.
По этим расчетам получается, что оптимальная конфигурация — 3S 4200mAh, но Вы пишите, что 4S более эффективный вариант. Объясните, пожалуйста, где я ошибся. Еще один вопрос, почему Вы рекомендуете 2200 mAh, а не 4200, исключительно из соображений стоимости, или использовать 4200 не имеет смысла по какой-то причине?
День города в Екатеринбурге. Съемка салюта с квадрокоптеров.
И еще, по настройке пидов надо было хоть перевод по ровнее сделать а не просто через гугл прогнать.
Так же не хватает информации по подключению всех модулей к контроллеру, какие проводки куда вставлять чтоб наглядно было а не просто схема с интернета.
Сделал Radio Calibration в Mission Planner.
Вынул usb кабель (плата выключилась).
Подключил акум, загорелась красная лампочка, который издали единичный писк, затем на не сколько секунд замигали красная и зеленая лампочки и снова замигала красная.
До этого было, что при включении акума, моторы издавали звук, как при переходе в режим, когда подключаешь напрямую 3-й канал к ресиверу.
Не хотят работать через плату.
Как с вибрациями боролись?)))
Только зарегистрированные и авторизованные пользователи могут оставлять комментарии.