Операция по трансплантации: мучаем квадрокоптер CXHobby CX-20. Часть 3

- Цена: $26
- Перейти в магазин
Часть 1
Часть 2
Часть 4
Attention! У меня, внезапно, появились проблемы с камерой из-за чего сильно пострадало качество фото в статье — снимал на iPhone. Также текст может содержать и наверняка содержит грамматические, орфографические, пунктуационные и другие виды ошибок, включая смысловые. Я всячески прошу читателей указывать на эти ошибки и поправлять меня посредством личных сообщений. Предварительно советую ознакомиться с моим обзором квадрокоптера CXHobby CX-20 для лучшего понимания происходящего.
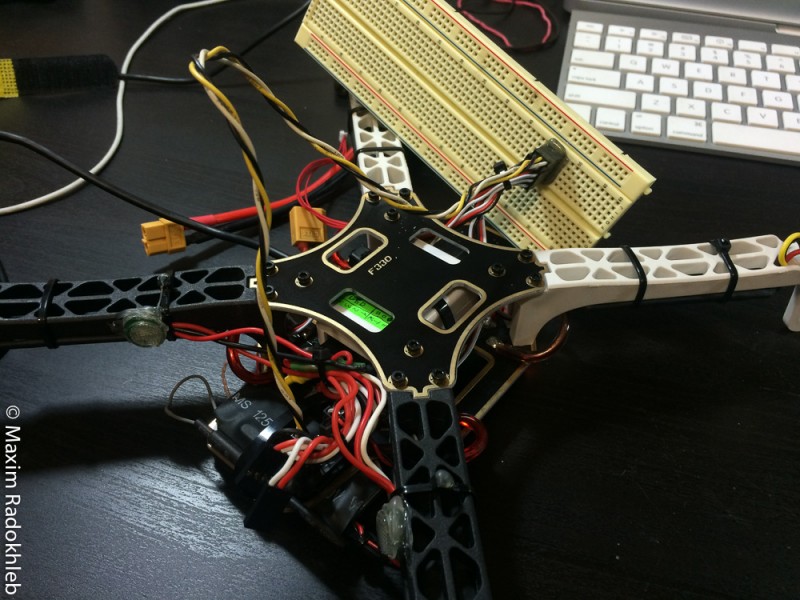
Вчера мы остановились на компоновке электроники квадрокоптера. Напомню, что белые лучи у меня спереди, а черные сзади. Аккумулятор будет установлен вдоль. Контроллер приклеен на вспененный двусторонний скотч. Приемник расположен на задней площадке нижней платы, а с обратной стороны — модуль питания.

Теперь сделаем небольшой экскурс в историю. В своем обзоре да и на протяжении этой серии статей я без устали передаю привет производителю квадрокоптера-донора. Дело в том, что эти товарищи (товарищ? :)) напрочь выпилили FailSafe (защиту от переразряда АКБ) режим по питанию. Мало того, что глубокий разряд может убить аккумулятор — это мелочи по сравнению с падением вертолета, когда АКБ разрядится. Именно в последствии тестирования этой функции CX-20 превратился в, как его нарекли в комментариях, «франкенкоптер».

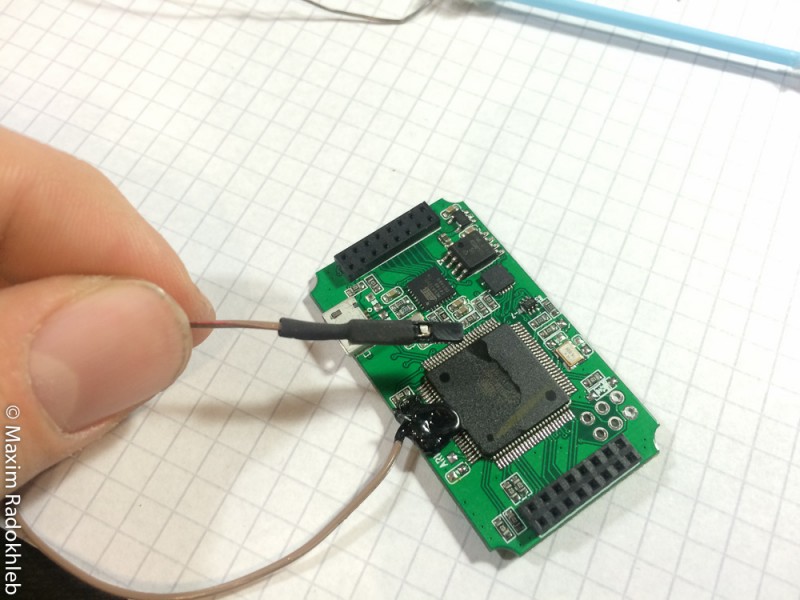
Но нет той баги, которую нельзя победить. Умельцы на зарубежных форумах обнаружили «висящими в воздухе» выводы микроконтроллера (АЦП12 и 13, 85 и 84 пин), которые отвечают за мониторинг напряжения и тока. Для работы последнего нужен дополнительный датчик, а вот напряжение можно просто подавать на вход АЦП через делитель и фильтрующий конденсатор прямо с АКБ. Это я обосновываю надобность делителя в самодельном модуле питания о котором я рассказывал в предыдущей части.

Ну, а дальше дело техники — подпаяться к одному из выводов микроконтроллера с шагом 0.5 мм. Сложно, особенно без постоянного опыта, но реально.

Отмыл от флюса и залил клеем. Всем сердцем ненавижу такие «костыли и сопли», но страховка никогда не бывает лишней.
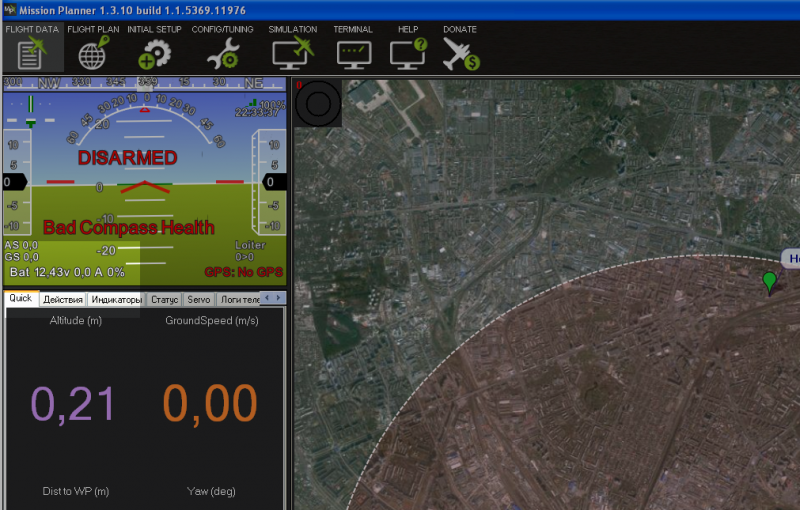
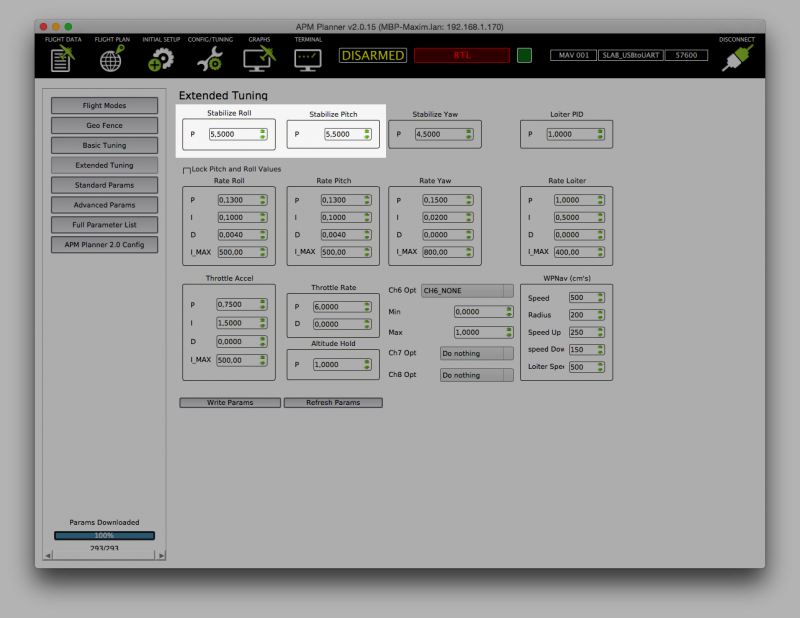
Подключил по USB к компьютеру с запущенным Mission Planner, установил связь, а оно мне показывает 2 с лишним Вольта… =/ Полез в Full Parameter List и откопал 3 параметра для настройки мониторинга напряжения:
BATT_VOLT_PIN — порт, к которому подключен датчик напряжения. Соответствует значению 13, т.к. аналоговый вход №13.
BATT_MONITOR — тип мониторинга. 3, если только напряжение и 4, если присутствует датчик тока.
BATT_VOLT_MULT — некий калибровочный коэффициент, который должен быть на уровне с коэффициентом резистивного делителя от АКБ. На деле же лучше подобрать это значение снимая напряжение с аккумулятора мультиметром и подгоняя точность вручную. У меня он равен 2.52.
Если будете повторять сей хинт, то обязательно после установки и настройки датчика проверьте установки FailSafe режима. Тут можно указать действия аппарата при разряженном аккумуляторе и собственно сам порог разрядки.
Телеметрия
Оригинальная с сайта 3DRobotics — $100, копию я взял в GearBest за ~25 долларов. С покупкой не оригинальной телеметрии нужно быть аккуратнее. Помните тот случай с палеными чипами FTDI? И собственно борьбу компании за интеллектуальную собственность? Так вот лучше перестраховать и расспросить менеджера(-ов) насчет используемого моста USB-UART. В теме не оригинальной телеметрии надежней будет решение на базе CP2102 от SiLabs.
Частота в 433 МГц выбрана из-за того, что официально разрешена. Знаю, многие и с 915 МГц без проблем летают и беспокойства не знают, но пока решил не рисковать. Закрепил модуль на нижней плате, потом, скорей всего, перенесу на верхнюю плату или один из лучей.

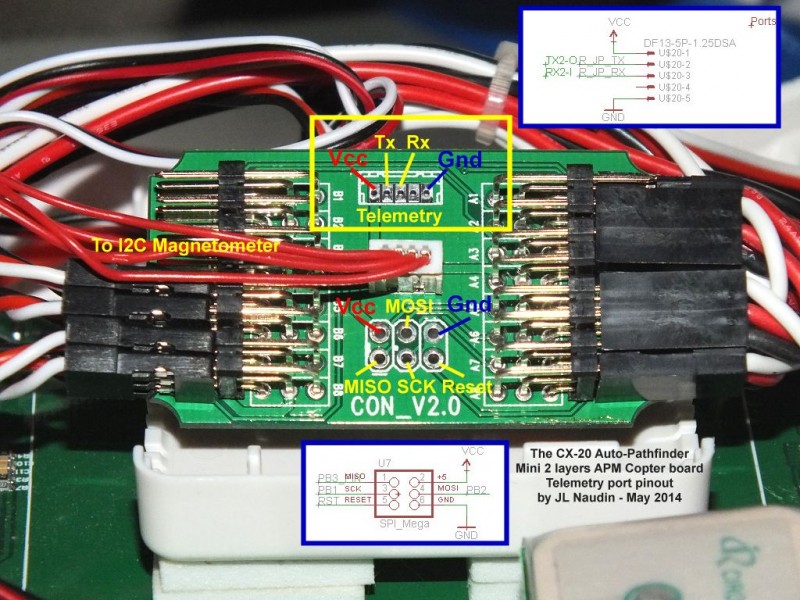
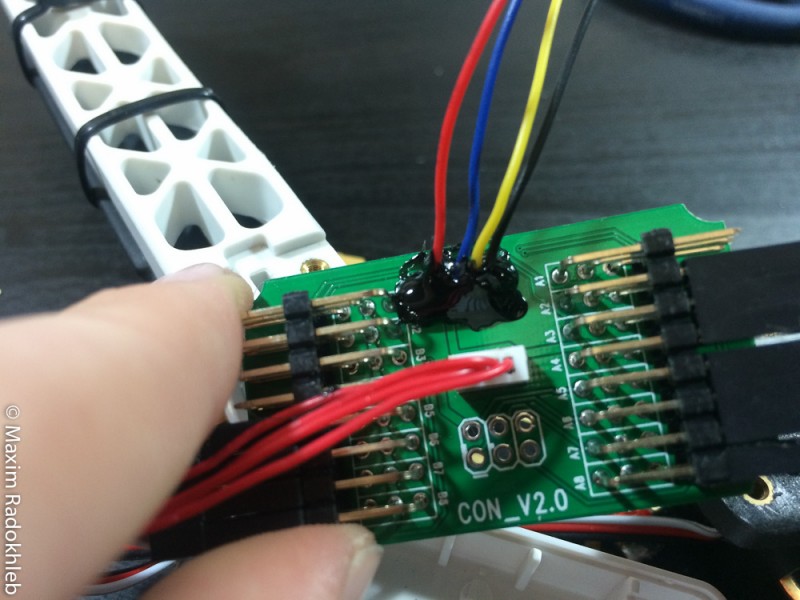
Установка модулей предельно проста и все благодаря сообществу пользователей: статья о подключении телеметрии к нашему аппарату (англ.) и материал о настройке телеметрии для APM-подобных контроллеров. Припаиваю провода от модуля-передатчика к «мозгам» квадрокоптера следуя распиновке:
Ну и клеем их, клеем! Эти сопли, наверное, уже стали символом моего рассказа. :)
Воткнул приемник в USB, на квадрокоптере подключил АКБ — зеленые диоды на модулях горят, а не мигают, значит телеметрия предварительно была настроена на совместную работу. В противном случае советую все сделать по инструкции с сайта APMcopter.
Программное обеспечение
Выбор Mac'овода падает, естественно, на кроссплатформенный APM Planner. Можно, конечно, старый, но проверенный временем Mission Planner через виртуальную машину запускать, но зачем если есть нативное ПО?
Со смартфонами все несколько хуже, т.к. он должен: а) поддерживать USB-OTG; б) быть на ОС Android. У меня для этих целей есть Xiaomi Redmi 2, обзор которого я напишу через пару недель. Самих программ достаточно обширный выбор, но лично я остановился на официальной «Tower (DroidPlanner 3)», которая помимо всего прочего еще и неплохой дизайн имеет.
Калибровка
Калибровать начал с передатчика радиоуправления. Опять же все по инструкциям с YouTube. Первая калибровка производиться собственными силами передатчика, без дополнительного ПО.После передатчика нужно откалибровать ESC. Тут есть несколько способов, но самым «правильным» мне показался этот. Собрать такую же приспособь для объединения всех сигнальных проводов от ESC можно на макетной плате.
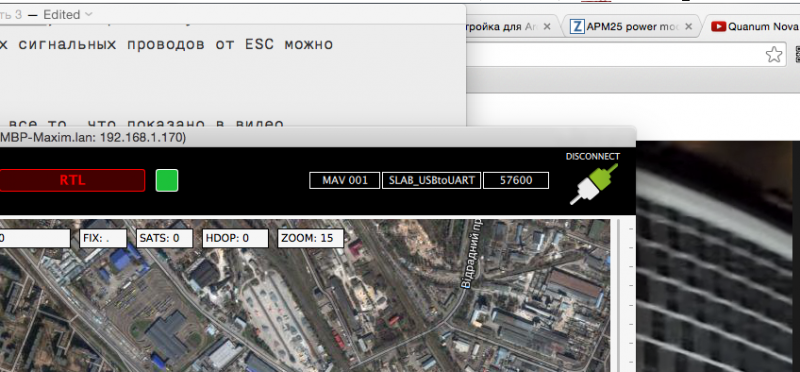
В общем-то переводить на слова все то, что показано в видео смысла не вижу — все элементарно. Подключаем квадрокоптер к компьютеру через телеметрию нажатием кнопки Connect в правом верхнем углу, скорость соединения устанавливаем 57600. Предварительно нужно поставить драйвера на модуль используемый в приемнике телеметрии. В моем случае это CP2102.
Теперь можно откалибровать аппаратуру радиоуправления по этой инструкции. В том же меню, где делается калибровка аппаратуры есть пункт «Accel Calibration». Калибровка акселерометра происходит буквально за 5-6 шагов, нужно просто выполнять действия, на которые указывает вам программа. Пробный, «комнатный», пуск прошел на ура (видео).
Контрольное взвешивание перед завтрашним уличным тестом. 762 грамма «тушка» + 28 винты. GPS и компас со стойкой все еще не установлены.

На улице относительно потеплело, но к двум часам поднялся ветер (5 м/с) и летать не столь трудно было, сколько холодно — руки мерзнут на ветре.

Милое дело подключать телеметрию к смартфону, правда, пока она используется только для мониторинга напряжения на АКБ.

Перед полетом обязательно крепко затягиваю гайки крепящие винты. Большие надежды полагал на самозатягивающиеся пропеллеры 9443 (как по удобству использования, так и по летным характеристикам), которые копия DJI, но они не подошли по размеру. Сейчас заказал 9043 и о них в следующей, надеюсь последней, части.

Взлетел-взлетел! А хотя, чего бы ему не взлететь? Я все уже дома проверил. Газ висения, если верить автоматическому расчету APM Planner составляет 50.8%. Оно и на деле где-то в пределах этого значения колеблется, но из-за сильного ветра нормально в «ручном» режиме (стабилизация по акселерометру и гироскопу) повисеть не удалось.

Аппарат, правда, в режиме Stabilize (ручном) ну очень резкий. По приезду домой скрутил параметры Stabilize Roll (тангаж) и Pitch (крен) с 5,5 до 4.
После полета на АКБ осталось 11.3 В, а летал я до просадки в 10.5 В, из чего делаем вывод, что падение напряжение в полете составляет около ~2.6 В на банку.
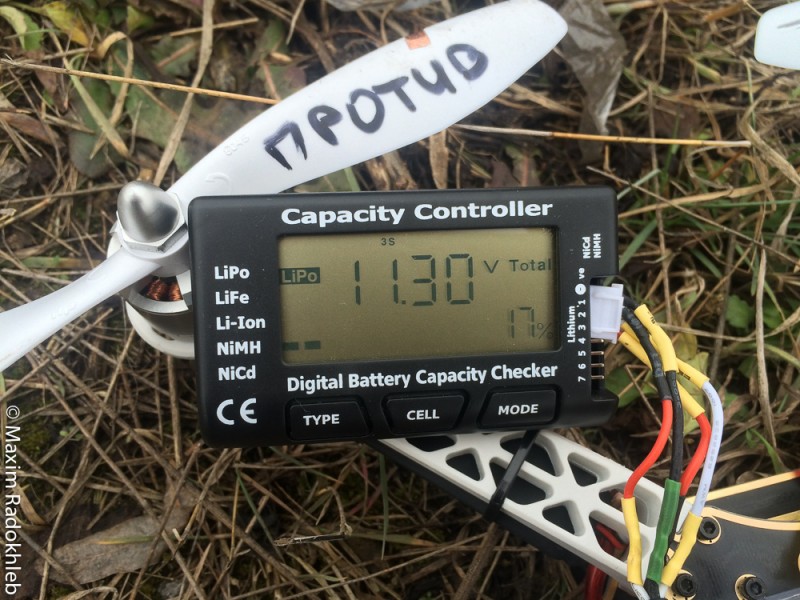
Тестер, кстати, весьма удобная штука. Возможностей у него много больше, чем у пищалки с DX. Предоставлен на обзор магазином TomTop, купить его можно там почти за 10 долларов. Точно не помню, но на момент заказа, кажется, цена была ниже, что-то около 7 баксов.

Время полета составило 10 минут 21 секунду. Не сказать, чтобы это прям висение было, скорей смешанный режим, но до максимума обороты в Stabilize не доводил — страшно уронить аппарат.

Четвертая часть, пожалуй, будет заключающей. В ней расскажу об установке/настройке GPS и компаса, АКБ и ЗУ для оных, приведу окончательные технические характеристики получившегося квадрокоптера и тесты автономности. Возможная установка FPV, новой аппаратуры и пр. будет вынесено в отдельный материал.
Все интересующие вас вопросы и пожелания можно также задавать в соцсетях: Facebook, ВКонтакте, Twitter, Instagram (кстати, подписывайтесь — тут также иногда проскакивают интересные девайсы).
| +72 |
20808
86
|
| +31 |
2121
66
|
| +47 |
3745
92
|
Сайт MYSKU.club cоздан для обзоров товаров, заказанных в зарубежных интернет-магазинах AliExpress, Amazon, Ebay и других.
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку.
Если Вы купили что-то полезное, то, пожалуйста, поделитесь информацией с другими.
Также у нас есть DIY сообщество, где приветствуются обзоры вещей, сделанных своими руками.
-
1026.32
Скидки и распродажи

-
445.39
AliExpress

-
273.05
DIY, или Сделай сам

-
187.28
Ebay

-
179.74
JD.ru

-
155.08
Магазины Китая

-
98.02
Новости сайта

-
77.49
Другие магазины
-
71.57
Магазины России и СНГ

-
68.46
TaoBao

-
vlo → Паяльник на 60Вт с керамическим нагревателем и регулировкой температуры, по акции за 189р. Небольшой обзор с разборкой.
-
Closer_to_sky → Обзор измерителя внутреннего сопротивления аккумуляторов HT-RT01
-
flashaholics → Пенал для канцелярских принадлежностей от Hongdian
-
jackavenger → Камера микроскоп с матрицей Sony IMX307, авто фокус, серия первая.
-
flashaholics → Обзор недорогого ноутбука Ninkear N15 Air на Intel N95
-
qetuo66 → Триммер G-wekliss GD-8780 для носа и ушей за 375 ₽
-
hanzo → Налобный фонарь Wurkkos HD20, аккумулятор 21700, два светодиода, обратная зарядка, магнитное крепление за 2566 руб
-
cartmannn → Зарядное устройство ToolkitRC М7 Компактный комбайн для моделистов
из за своей массы наоборот уменьшит время полета
От меня мой CX 20 вместе с Gopro 3 решил свалить из за сильного ветра.
Я не думал что в стоке у него такие маленькие углы наклона, ни годы опыта, ни GPS режим не помог справиться с ветром, в итоге отвел его над деревьями высотой метров в 25, чуть снизил высоту пока еще видел где он в небе — и выключил моторы.
Краш и камера без повреждений, а вот в след раз крашнул по той же причине с 1 метра и сломал ногу.
На фото видно — он висит боком в попытке вернуться к месту старта. Но толку от этого — 0.
В проге какие были настройки в стоке? И какие советуете поставить что бы добавить углов?
Только зарегистрированные и авторизованные пользователи могут оставлять комментарии.