Неорганический полимерно-кристаллический стратегический беспилотный мультироторный летательный аппарат или квадрокоптер за 10.000р.

Чуть больше года прошло с тех пор, как я приобщился к покупкам в зарубежных интеренет-магазинах. Все необходимое (лампочки, телефоны, планшеты, батарейки, фонарики, зарядники) уже было куплено(и частично продано) и все последние приобретения были сделаны либо по различным акциям(за копейки) либо по хвалебным обзорам опубликованной на любимой нами Муське.
Все началось с того, что захотелось полетать на радиоуправляемом вертолете, типа WLtoys V911, но что-то удерживало от покупки. Уж слишком игрушечным он мне казался, хотелось чего-то серьезного. Примерно в Сентябре месяце, читая очередной обзор квадрика, кто-то из комментаторов выложил ссылку на youtube с видео, снятом с борта квадрокоптера с FPV. И вот тут я понял, что я хочу.
Совместно с жабой было решено собрать максимально бюджетный квадрокоптер, но с возможностью дальнейшего наращивания системы – FPV, видеосъемка, GPS и т.д.
Теперь немного теории. Строить решил X-образный вариант квадрокоптера, просто потому, что мне такой вариант больше по душе. Блок схема электрооборудования:
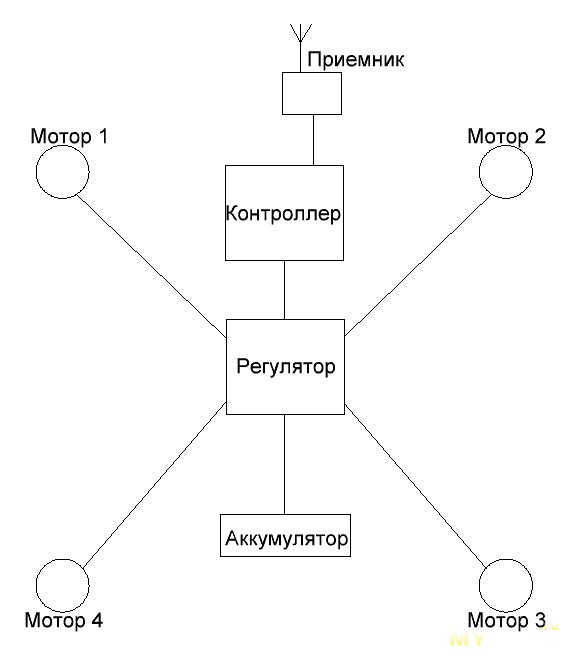
Силовая установка состоит из аккумулятора, регулятора оборотов и моторов. Здесь должно соблюдаться следующее условие: Aм<Aр<Aа, где
Aм – максимальный суммарный ток моторов,
Aр – максимальный ток регулятора,
Aа – максимальный ток аккумулятора.
Например, максимальный потребляемый ток мотора 20А, ток регулятора 25-30А, ток аккумулятора 120-150А.
Подбор комплектующих начал с чтения профильных форумов и изучения HobbyKing, с которым на тот момент я уже был знаком, поскольку приобретал LSD аккумуляторы AA и AAA типоразмеров. Для расчетов пользовался калькулятором мультироторных систем http://rc-calc.com — по этой ссылке расчет именно той конфигурации квадрика, которая присутствует на видео в конце обзора. Покупки делал частями по 1000-3000р., за исключением очков для полетов FPV. По мере совершения покупок несколько раз менялся состав комплектующих — искал наиболее выгодные цены, в итоге получил такой набор:
1. Рама X525 V3 наиболее выгодный вариант цены найден на eBay $20.98 + $2(доставка)
2. Выбор полетного контроллера остановил на Hobbyking KK2.0 — $27.95 (со скидкой по Buddy коду)
2.1 ESC (регулятор оборотов) бюджетный вариант 4в1 — Q Brain 4x25A (2-4S 3A SBEC) — $28.91 (со скидкой по Buddy коду)
2.2 Карта программирования регулятора оборотов TURNIGY BESC Programming Card — $6.91 (со скидкой по Buddy коду) + $6.99 доставка (п.2, п.2.1, п.2.2)
3. 4 бесколлекторных мотора HP2812 880KV — $51.48Поскольку моторы комплектовались цанговыми пропадаптерами, то посчитал разумным их не использовать и заказал Prop adapter w/ Steel Nut M6x3.2mm shaft 4шт. за $7.16
3.1 2 пары запасных подшипников — $1.98
3.2 2 запасных вала — $2 (которые потерялись за время доставки)
3.3 10 стопорных колец для вала — $1
3.4 10 пар коннекторов Ф3.5mm типа банан для подключения моторов к ESC – $3.99 + доставка $4.19 (п.3, п.3.1, п.3.2, п.3.3, п.3.4)
4. Аккумулятор Turnigy 3300mAh 4S 30C — $27.16 (со скидкой по Buddy коду) – накопленные баллы + 5.81 доставкаПозже был докуплен Turnigy 5000mAh 4S 25C — $47.10 с доставкой
5. Пропеллеры 8x4.5 – 2 комплекта — $1.24x2 = $2.48 + доставка $3.99
6. Пропеллеры 9x4.7 – 2 комплекта — $3.02x2 = $6.04
6.1 Пропеллеры 10x4.5 – 2 комплекта $2.65x2 = $5.30
6.2 Пропеллеры 10x4.5 – 2 комплекта $2.65x2 = $5.30 + доставка $9.99
Зачем так много пропеллеров? Ну, во-первых это расходный материал, а во-вторых нужно было определиться с размером. Теоретический расчет в калькуляторе это одно, на практике может быть другое. Например, при установке пропеллеров со слишком большой тягой могут перегреться и выйти из строя моторы.
Долго не мог определиться с аппаратурой управления. Изначально хотел заказать 9-и канальную Turnigy 9X — $60, но стоимость доставки почти в $40 не расположила меня к покупке. Поэтому, поискав альтернативные варианты, заказал 6-и канальную FlySky FS-T6 за $58.50.
 Для управления квадрокоптером достаточно 4 канала. Кстати, несколько раз в интернете натыкался на информацию о том, что FlySky делает аппаратуру для Turnigy, или Turnigy копирует у FlySky (Сравнение Turnigy 9x и FlySky TH9x).
Для управления квадрокоптером достаточно 4 канала. Кстати, несколько раз в интернете натыкался на информацию о том, что FlySky делает аппаратуру для Turnigy, или Turnigy копирует у FlySky (Сравнение Turnigy 9x и FlySky TH9x).Также потребуются:
1 зарядное устройство — iMAX B6, уже много раз обозреваемый
2 балансир для пропеллеров
3 набор инструментов
4 паяльник
5 прямые руки
Помимо этого рекомендую взять 20 в 1usb Flight Simulator для отрабатывания навыков в симуляторе. Позволяет подключить аппаратуру управления к компьютеру и использовать лицензионный симулятор. Сейчас пытаюсь научиться летать и на вертолете.
К сожалению, процесс сборки рамы и навесного оборудования не снимал, но думаю, что ни для кого это не составит труда.
В виду особенности формы и размеров регулятора оборотов, его установка была произведена между центральными пластинами рамы.
Ну что ж, рама собрана, моторы установлены, пришло время произвести основные настройки. Поскольку контроллер довольно популярный и разобран вдоль и поперек, то в обзоре решил использовать видео, снятое множеством других владельцев платы.
1 Программирование регулятора оборотов.
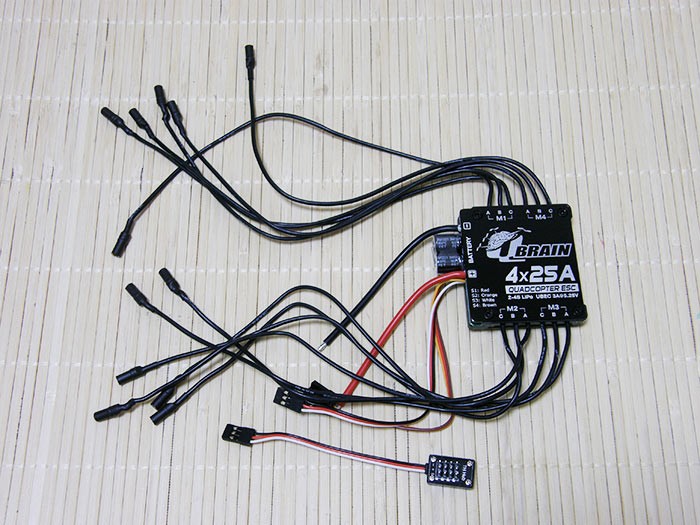 Особенность регулятора оборотов в том, что выполнен он в одном корпусе, и это имеет свои плюсы и минусы:
Особенность регулятора оборотов в том, что выполнен он в одном корпусе, и это имеет свои плюсы и минусы:+ стоит дешевле, чем 4 обычных регулятора
+ не занимает места на лучах рамы
— в случае выхода из строя одного из каналов затраты на покупку больше
Для настройки ESC воспользуемся картой программирования Turnigy. Для выполнения процедуры необходимо поочередно подключить каналы регулятора и выбрать нужные настройки на программаторе. Выбор производится кнопками вверх-вниз, влево-вправо, запись настроек по кнопке ОК. Поскольку BEC присутствует только у одного канала регулятора, то для программирования остальных каналов, BEC регулятора нужно подключить к разъему Batt. карты, соблюдая полярность.

Описание настроек:
1 – Тормоз моторов – в режиме ON моторы мгновенно остановятся при минимальном значении стика газа
2 – Тип батареи литий, никель.
3 – Отсечка при достижении минимального порога напряжении батареи.
4 – Установка порога минимального напряжения батареи.
5 – Режим запуска моторов
6 – Время подачи напряжения на обмотки мотора, High – дольше время подачи, больше мощность, больше расход аккумулятора…
7 — Музыка / Li-Po ячейки — имеют различные значения для регуляторов с/без индекса “HV”.
Для регуляторов без индекса “HV”, например “Pentium-60A”, 4 светодиода индицируют 16 возможных позиций, представляя 16 ритма (мелодии) для регулятора. Регулятор будет играть музыку при включении. Для регуляторов с индексом “HV”, например “Pentium-60A-HV”, 4 светодиода показывают количество ячеек литиевого аккумулятор.
8 – Режим, позволяющий поддерживать заданную скорость вращения вне зависимости от нагрузки.
Я использую следующие настройки:
 1 — OFF
1 — OFF2 — Li-xx
3 — Soft-Cut
4 — Middle
5 — Soft
6 — Middle
7 — 0000
8 — ON
С регулятором разобрались, настало время контроллера.
2 Прошивка и настройка полетного контроллера.
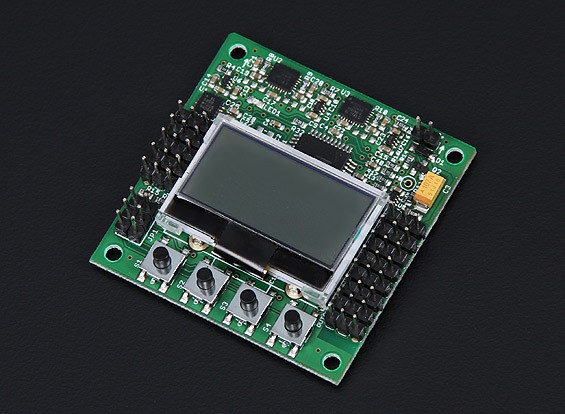
Вес: 21г. (включая зуммер)
Процессор: Atmega324 PA
Гироскопы: слева IDG-650, справа ISZ-650
Акселерометры: ADXL335
Автовыравнивание горизонта: Да
Напряжение питания: 4.8-6.0V
AVR интерфейс: 6 pin.
Стабилизация подвеса: Да, по двум осям. (с прошивкой 1.5 и выше)
Сигнал от приемника: 1520us (5 каналов)
Сигнал ESC: 1520us
Инструкция на русском
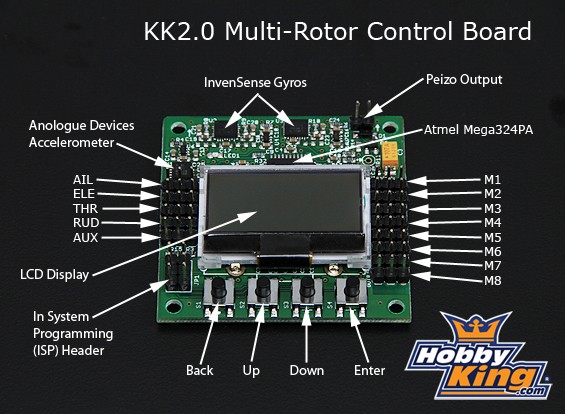
Для обновления прошивки контроллера до последней версии нам потребуется USBasp AVR программатор. Коннектор на плате контролера для прошивки и его распиновка на изображении ниже:
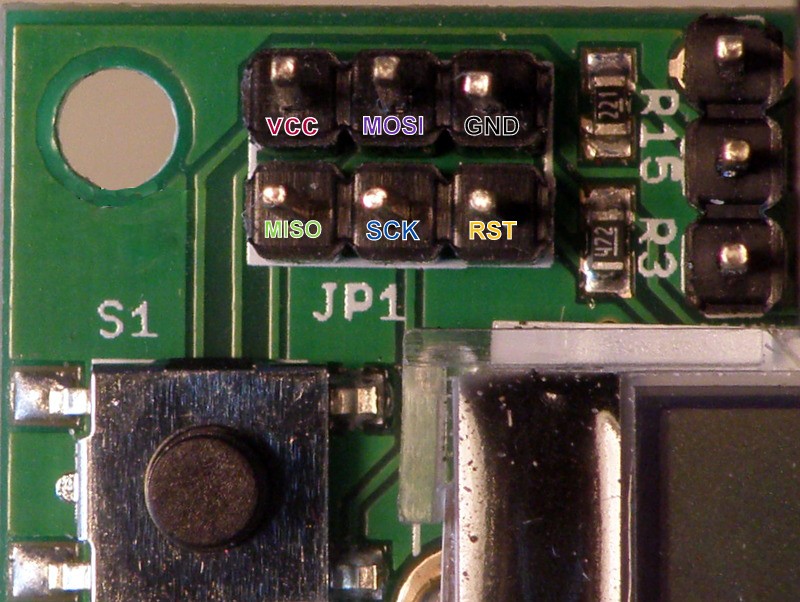
Поскольку программатор имеет 10-пиновый разъем, то можно докупить переходник 10pin-To-6pin, либо просто перекинуть провода на родном 10-пиновом разъеме, что я и сделал.
Аппаратная часть у нас готова, теперь позаботимся о программной:
Драйвер программатора — usbasp-windriver.2011-05-28.zip
Программа для прошивки — KKmulticopter Flash Tool V0.76, требуется Java
Видео-инструкция о процессе прошивки.
Мною была установлена прошивка KK2.0 V1.6 by KapteinKuk.
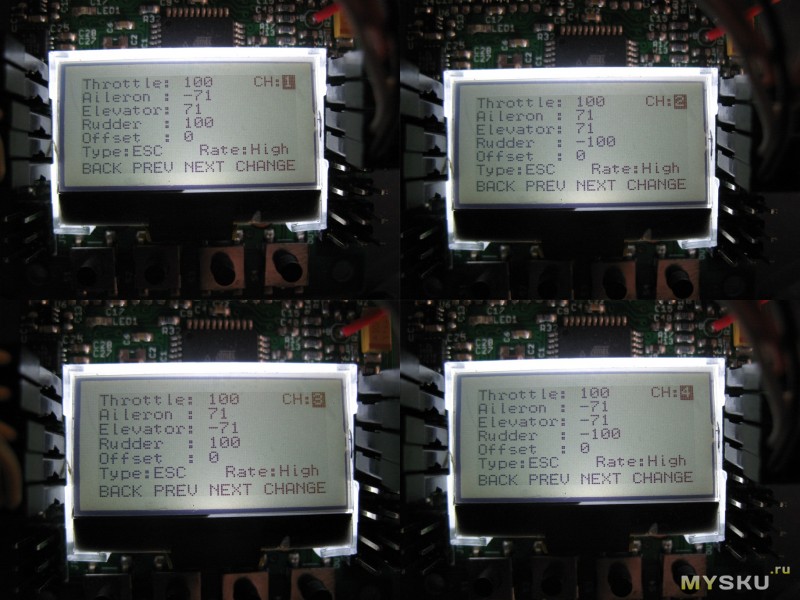
3 Привязка приемника к передатчику.
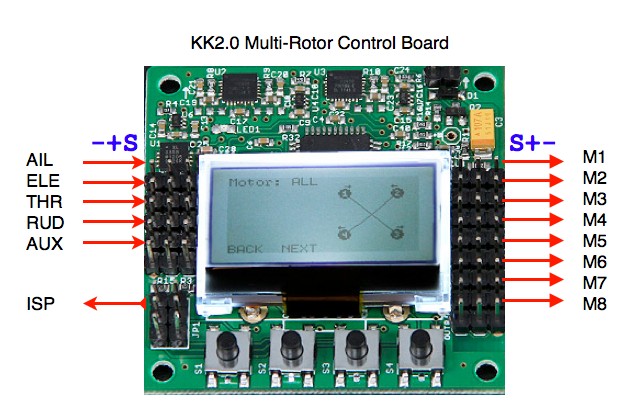
 1. Подключаем приемник к контроллеру согласно схеме:
1. Подключаем приемник к контроллеру согласно схеме:CH1<->AIL
CH2<->ELE
CH3<->THR
CH4<->RUD
CH5<->AUX (используется для вкл./выкл. режима Self-Level — само-выравнивание (удержание горизонта))
2. К коннектору BAT в приемнике подключаем перемычку, которая идет в комплекте
3. Подключаем аккумулятор к квадрокоптеру
4. Удерживая кнопку Bind на передатчике, включаем его и дожидаемся, пока не загорится светодиод приемника. Все.
4 Калибровка регулятора оборотов.
Процедура необходима для обеспечения синхронизации оборотов всех моторов, что особенно важно при взлете. Для этого:
1. Включаем передатчик, стик газа (Throttle) переводим в верхнее положение
2. Зажимаем кнопки 1 и 4 контроллера и подключаем аккумулятор, дожидаемся, когда контроллер несколько раз «пропищит»
3. Плавно, но быстро передвигаем стик газа в крайнее нижнее положение, контроллер отреагирует на это звуком
4. Отпускаем кнопки 1 и 4
5 Небольшая доработка
Контроллер комплектуется зуммером для озвучивания нажатий кнопок, который подключается к штатному коннектору на плате, но основное его предназначение – это оповещение о разряде батареи. Для этого необходимо подпаять провод к указанному месту и соединить его с «+» батареи.
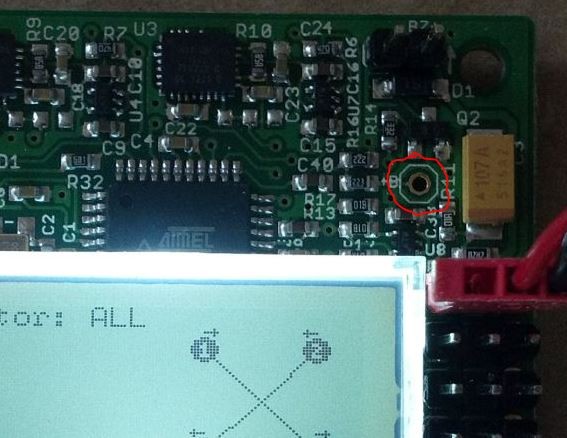 Затем нужно зайти в настройки и выставить пороговое значение напряжения. При этом следует учитывать, что напряжение задается в десятых вольта, то есть если пороговое значение напряжения 14В, то нужно ввести в настройках 140. Зуммер работает по принципу парктроника — чем ближе к заданному значению, тем чаще начинает пищать вплоть до непрерывного писка.
Затем нужно зайти в настройки и выставить пороговое значение напряжения. При этом следует учитывать, что напряжение задается в десятых вольта, то есть если пороговое значение напряжения 14В, то нужно ввести в настройках 140. Зуммер работает по принципу парктроника — чем ближе к заданному значению, тем чаще начинает пищать вплоть до непрерывного писка.6 Настройка полетного контроллера KK2.0 часть 1
Особенностью данного контроллера является полная автономность при изменении настроек, то есть компьютер для этого нам не потребуется. Все изменения можно производить «на коленке» в чистом поле. Сделали корректировку, взлетели и тут же видим реакцию на изменения. Именно поэтому я, как новичок, и выбрал эту плату.
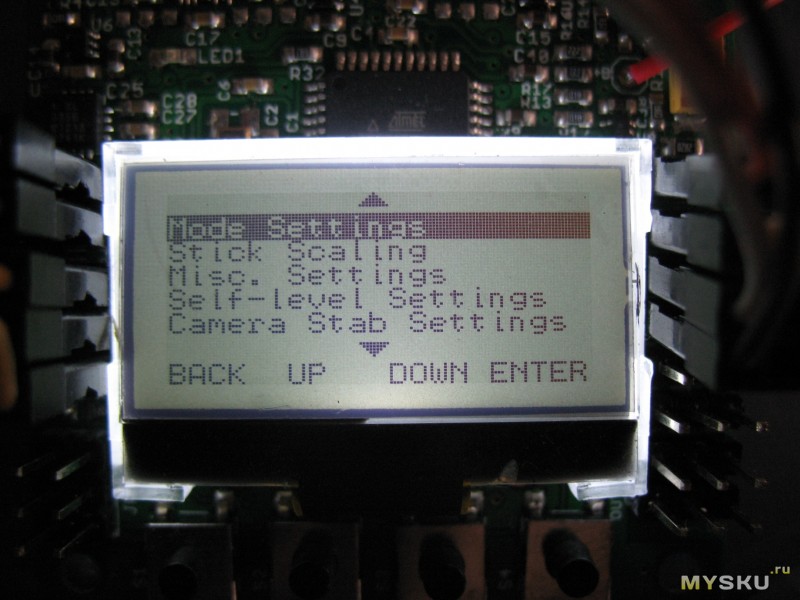
Итак, подключаем аккумулятор и заходим в настройки:
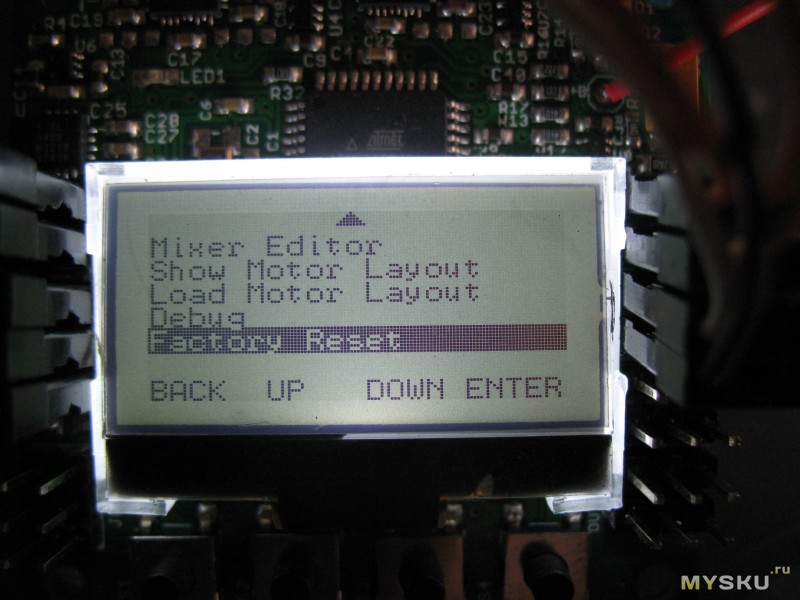
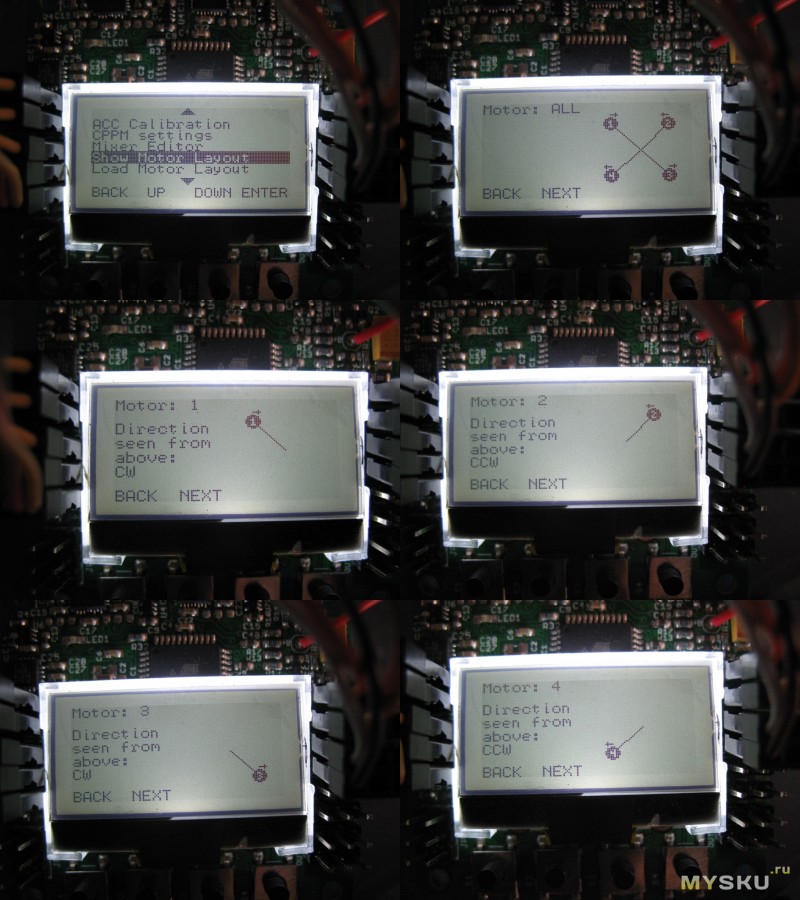
2 Задаем тип коптера в Load Motor Layout – Quadrocopter x mode
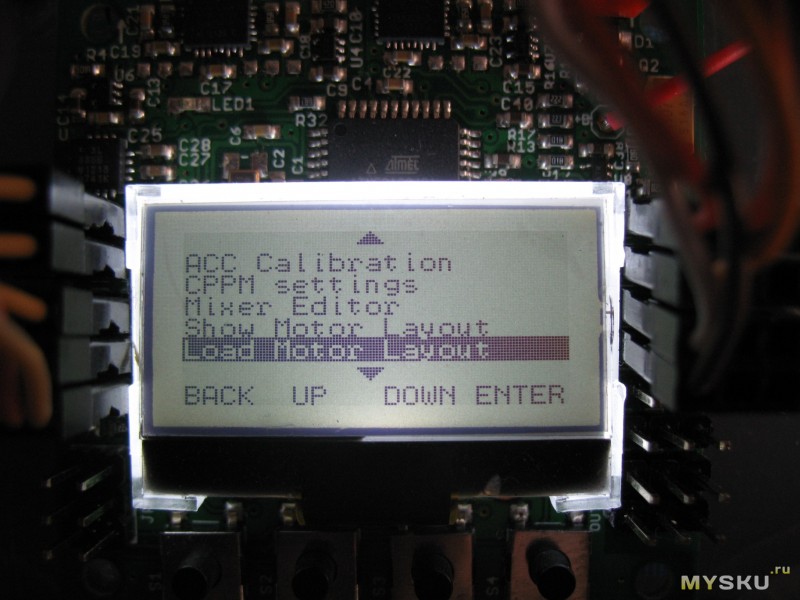
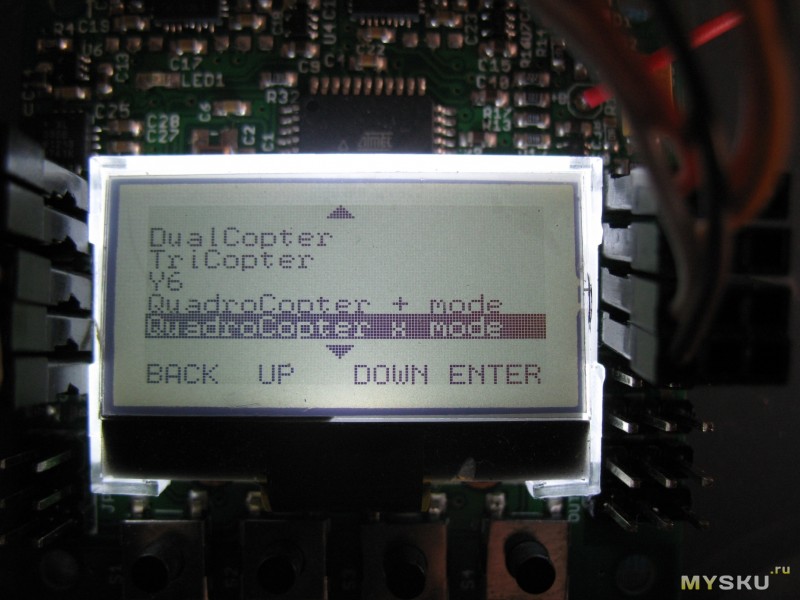

контроллер покажет номера моторов для подключения к соответствующим каналам регулятора и направление их вращения

эта информация будет доступна в любой момент при выборе пункта Show Motor Layout
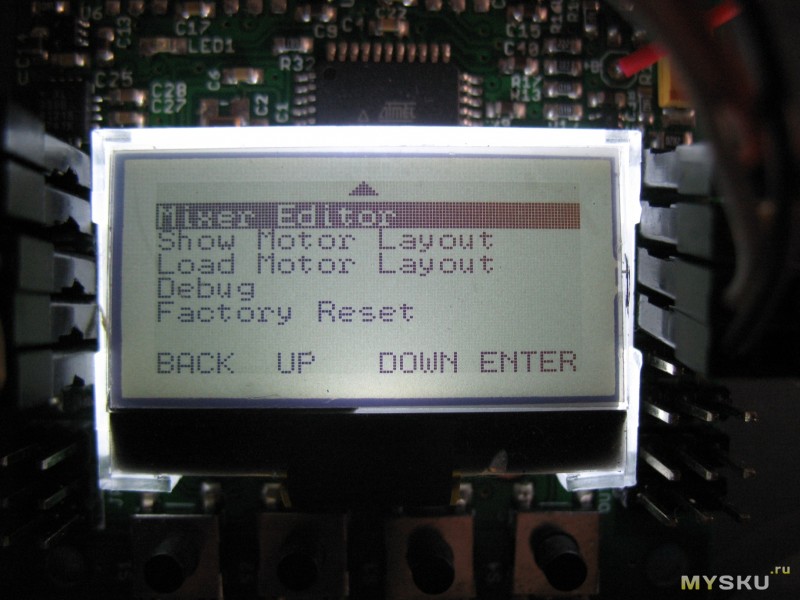
3 Mixer — проверяем настройки микшера
4 ACC Calibration — калибровка акселерометров
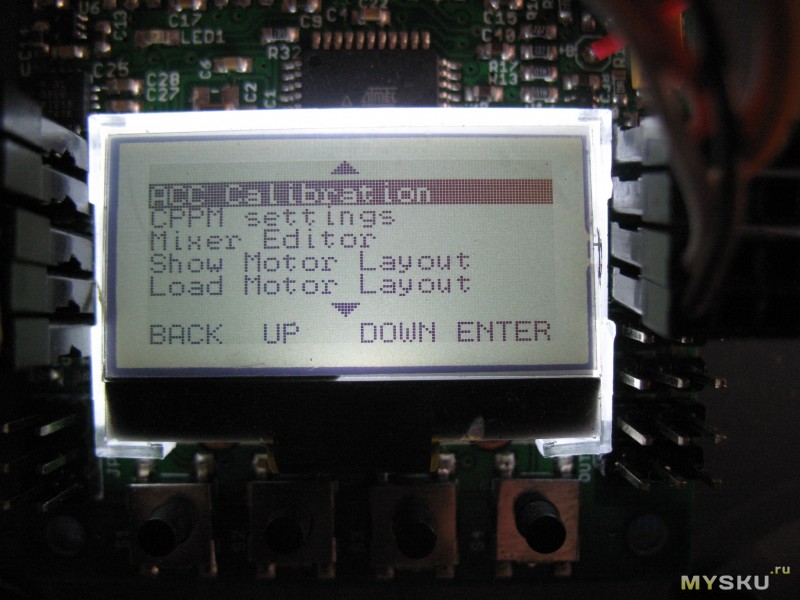
необходимо разместить квадрокоптер на ровной поверхности, некоторые рекомендуют даже выставлять по уровню и выбрать Continue
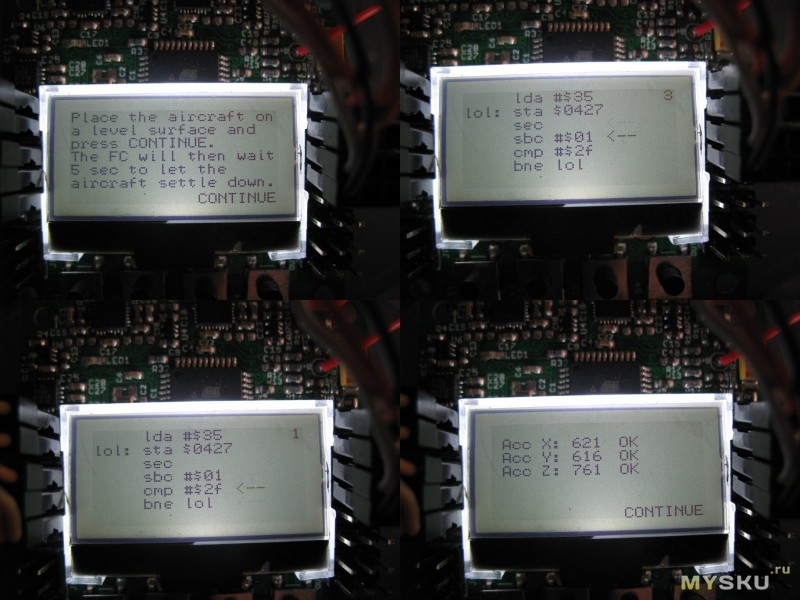
по окончанию процесса контроллер рапортует об успешной калибровке

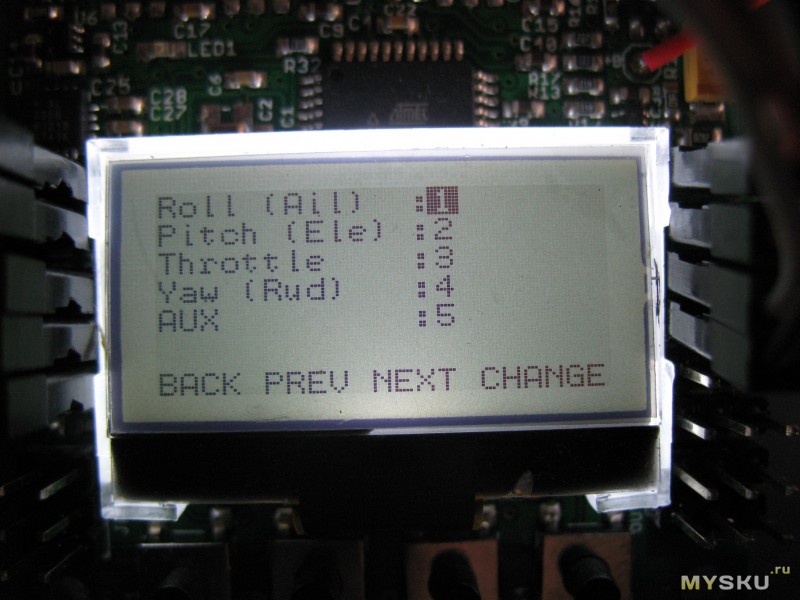
5 CPPM Settings (назначение каналов) — здесь можно оставить все по-умолчанию

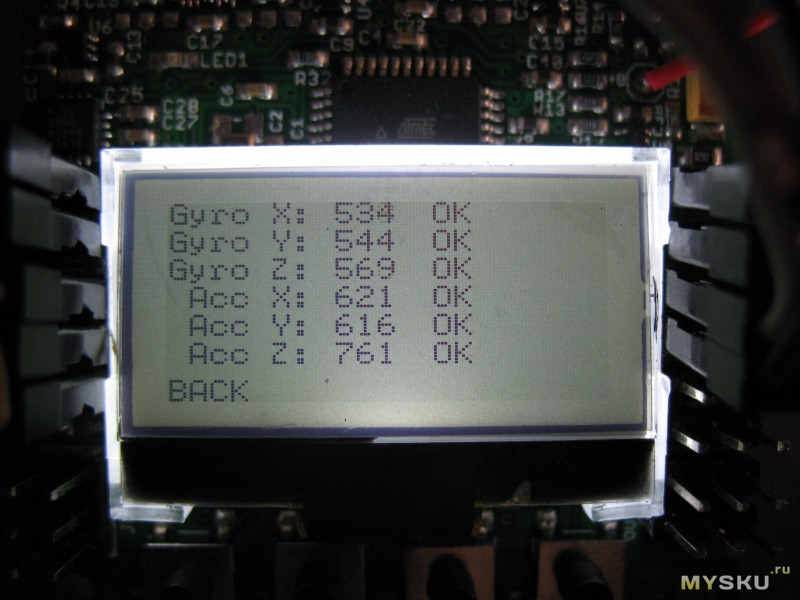
6 Sensor Test — проверка работы датчиков (гироскопов и акселерометров)

При перемещении или вращении контроллера в различных плоскостях будут меняться показания соответствующих датчиков
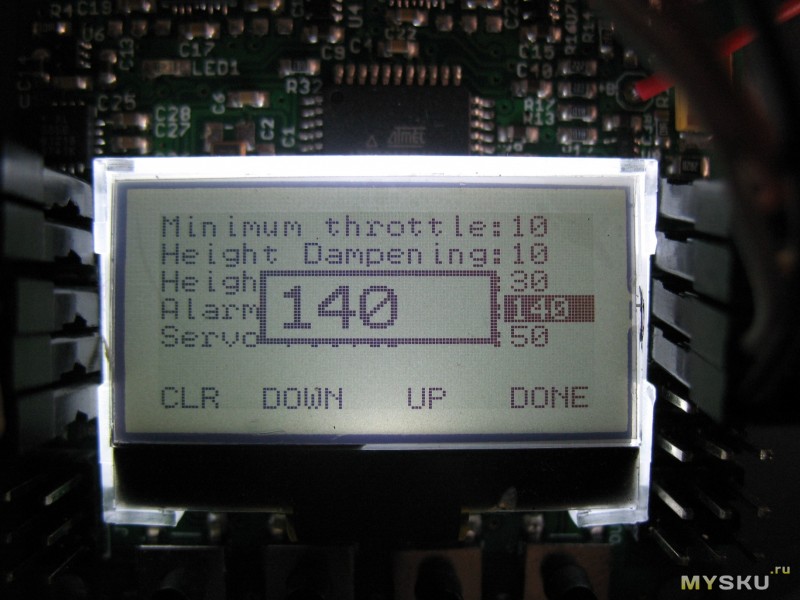
7 Misc.Settings — дополнительные настройки

Minimum throttle — минимальный уровень стика газа в процентах, при котором запускаются моторы
Alarm 1/10 volts — нижний порог напряжения батареи, при котором начинает срабатывать зуммер, об этом я писал выше
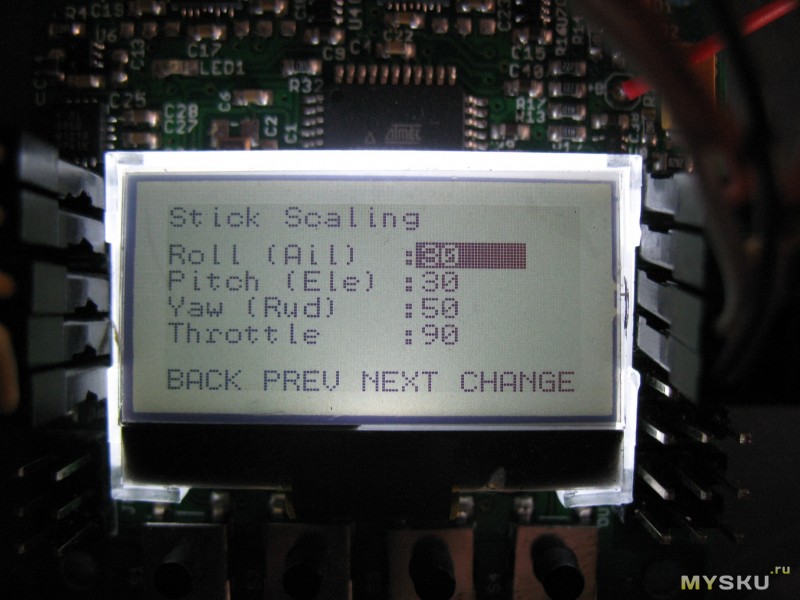
8 Stick Scaling — задает какой процент от максимальной мощности будет задействован для выполнения маневров — оставляем по-умолчанию.

9 Mode Settings — Self Level — настраиваем включение режима авто-выравнивания по сигналу с 5-го канала (AUX), Link Roll Pitch — связать настройки по крену и тангажу, ставим YES. Остальное не меняем.

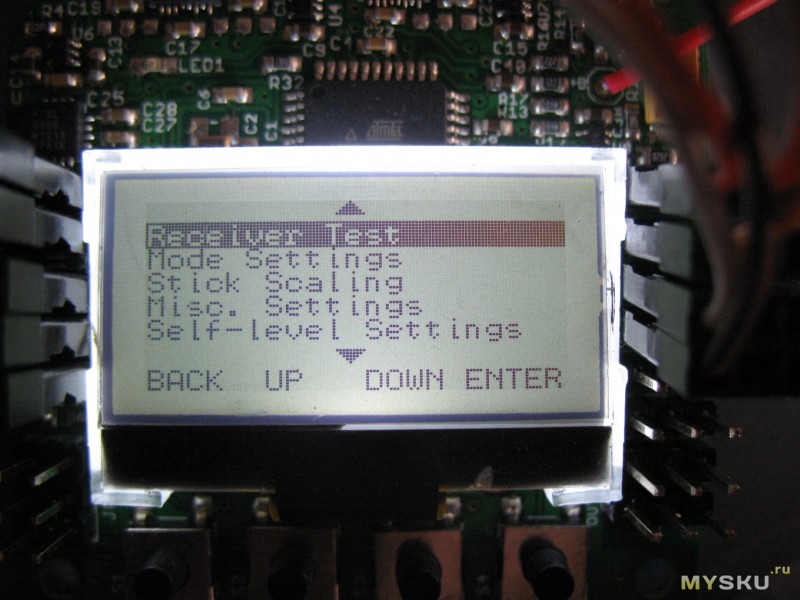
10 Receiver Test — позволяет проверить правильность подключения приемника, а также оттриммировать передатчик в 0.

7 Установка пропеллеров
Устанавливаем пропеллеры (но не затягиваем их!!!) согласно схеме
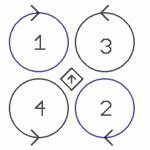
таким образом, чтобы при вращении в указанном направлении каждый отдельно взятый пропеллер создавал положительную подъемную силу.
После этого включаем передатчик и подаем питание на квадрик, армим. Даем чуть газу, чтобы моторы начали вращение и если какой-то из моторов вращается не в ту сторону — переподключаем(меняем местами) на нем любые два коннектора из трех. После этого пропеллеры можно затянуть.
8 Настройка полетного контроллера KK2.0 часть 2
Остались два наиболее важных и трудоемких пункта настроек.
11 PI Editor — редактор настроек PID

Трудоемкие — потому, что значения подбираются индивидуально для каждого аппарата, поскольку зависят от рамы и ее размера, как общего веса квадрокоптера, так и его отдельных компонентов, расположения центра масс и др. Однако, существует масса информации по поводу настройки PID. Привожу ссылки на те источники, которыми руководствовался сам:
KK2.0 LCD
Теория настройки ПИД и руководство по конфигурированию мультикоптеров
Настройка контроллеров мультироторных систем
Видео в котором показывается как ведет себя квадрокоптер в зависимости от его настроек
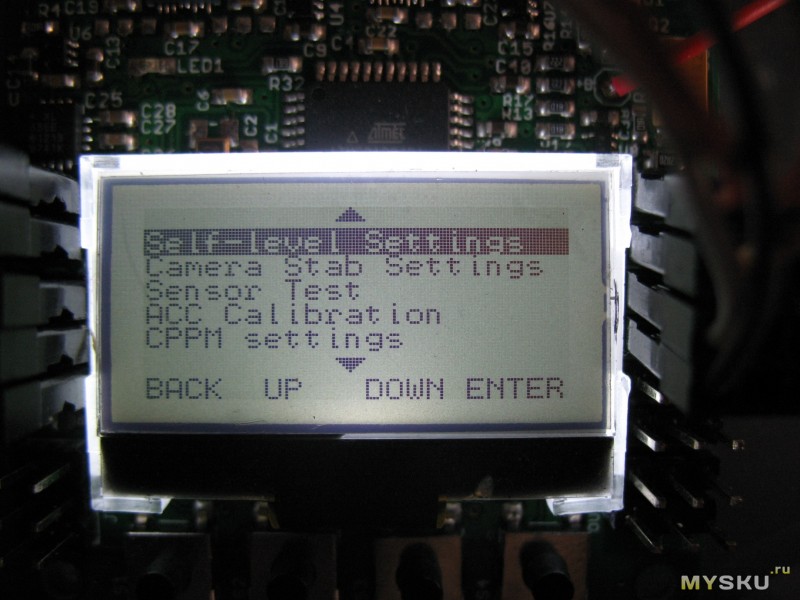
12 Последний пункт, который будем настраивать — это Self-level Settings
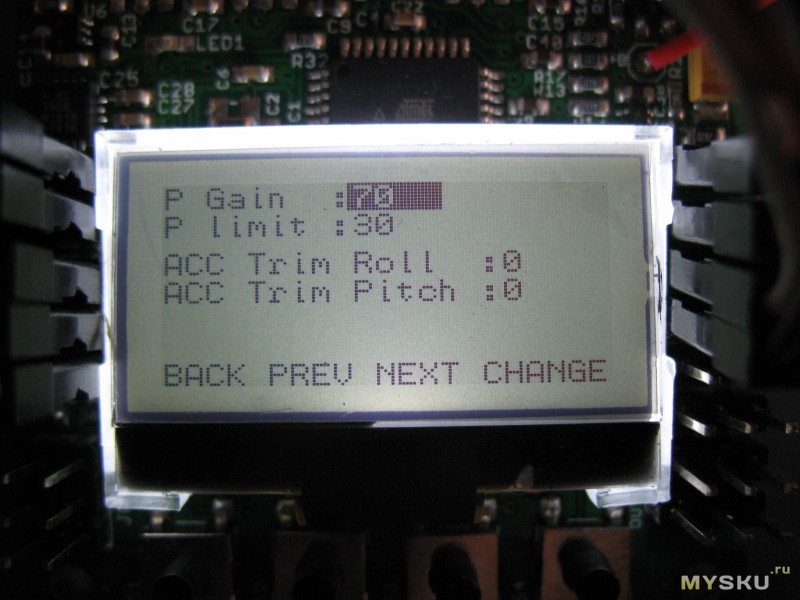
P Gain — как быстро коптер должен вернуться в горизонтальное положение
P Limit — ограничение мощности моторов для возврата в горизонтальное положение
Также имеет смысл настроить ACC Trim Roll и ACC Trim Pitch в случае если в режиме авто-выравнивания квадрик ведет в сторону.
а) Для этого нужно включить режим авто-выравнивания по горизонту в полёте и оттриммировать пультом, чтобы никуда не тянуло.
б) Взять из меню Receiver Test значения Roll/Pitch и внести их в меню «Self-level Setting» в соответствующие позиции АСС trim
в) В Receiver Test вернуть значения в 0.
г) Повторить, если ещё немного тянет.
Поведение квадрокоптера при изменении настроек Self Level
В итоге имею результат, который можно увидеть в ролике ниже. Youtube заблокировал мое видео из-за используемых аудио треков, поэтому залил на vimeo.
Настройки контроллера еще далеки от совершенства, но для 5 вылета, считаю, что результат неплохой.

Хронология полетов:
0-й — произошел дома — не отключил аккумулятор и при настройке аппаратуры управления квадрик армировался, взлетел и разбил экран телевизора и пробил подвесной потолок, я об этом уже упоминал в одном из своих обзоров.
1-й вылет (январь) — не изолировал от внешней среды регулятор оборотов, попал снег и в итоге выгорел один канал. Пришлось покупать новый.
2-й вылет (февраль) — он летает!!! (но забыл дозарядить аккумулятор)
3-й вылет (март) — ветром снесло к зданию, не сориентировался в пространстве. Удар об стену и падение с высоты 5-го этажа. Никто, кроме квадрика не пострадал. Две ноги и три мотормаунта на замену — на восстановление около 500р.

5-й вылет (апрель) — на видео
PS возможно, обзор получился довольно скомканным из-за большого количества информации, а из-за проблем со свободным временем писал частями, начиная с декабря! месяца.
Я абсолютно не затронул темы настройки аппаратуры управления, поскольку это тянет на еще один обзор. Добавлять в этот или создавать новый — еще не решил.
Если вы нашли смысловую или грамматическую ошибку — отписывайтесь.
| +138 |
5466
71
|
| +86 |
4191
32
|
Сайт MYSKU.club cоздан для обзоров товаров, заказанных в зарубежных интернет-магазинах AliExpress, Amazon, Ebay и других.
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку.
Если Вы купили что-то полезное, то, пожалуйста, поделитесь информацией с другими.
Также у нас есть DIY сообщество, где приветствуются обзоры вещей, сделанных своими руками.
-
1026.32
Скидки и распродажи

-
445.39
AliExpress

-
273.05
DIY, или Сделай сам

-
187.28
Ebay

-
179.74
JD.ru

-
155.08
Магазины Китая

-
98.02
Новости сайта

-
77.49
Другие магазины
-
71.57
Магазины России и СНГ

-
68.46
TaoBao

-
serge_petrov → Титановая рулетка TEC Ti-Tape - инструмент или тапочки для тараканов?
-
vlo → Паяльник на 60Вт с керамическим нагревателем и регулировкой температуры, по акции за 189р. Небольшой обзор с разборкой.
-
Al3 → Измеритель внутреннего сопротивления аккумуляторов по 4-проводной схеме TS457
-
verterr → Смотрим в ночи: монокуляр ночного видения FNIRSI NVS-20 (4 779,99 ₽)
-
UnknownUser → ATX-блок питания Cooler Master MWE White 750W V2
-
sangman1987 → Ранцевый аккумуляторный садовый опрыскиватель Sturm GS8212N
-
39ru → Новая жизнь сверлильного станка. Делаем удобное управление
-
ivannada66 → YR1035 - прибор для измерения импеданса химических источников тока на частоте 1 кГц. Часть I (основная)
-
avihome → Механический карандаш Uni Kuru Toga и ластик Pentel Hi-Polimer, давно известные достижения японского карандашестроения.
-
mooni73 → Модернизация мультиметра: вместо "кроны" питание от аккумулятора старого смартфона.
IMHO лучше 4 обычных
Обычные регули — универсальные, то есть ставь хоть на мультиротор, хоть на лодку, хоть на вертолет, поэтому в случае установки на мультиротор и требуется прошивка. 4-х канальный регуль изначально заточен под квадрокоптер, в том числе и стоковая прошивка. Об этом я несколько раз находил информацию на англоязычных форумах.
+ экономия на USB программаторе еще 5-7 баксов, а это уже $7-10. Жаба не одобряет )
ЗЫ программатор лишним не будет )
а 10 штук, разбитый телевизор и потолок жаба одобряет?
но однозначно плюс… это только расписать все это по полочкам сколько трудов… а уж делать
а что другого места то кроме высоковольтных проводов не нашлось для съемки? или специально для демонстрации маневренности?
В пути экшн-камера $75 и новый полетный контроллер $52
Жаба присутствовала только в самом начале. А потолок и телевизор в планы не входили, действительно несчастный случай.
Обзор надо было уже запускать в тираж, а видео не было. Договорился с другом, чтобы поснимал, но он был ограничен в свободном времени. Поэтому ехать в поля на край города никак не получалось.
И еще интересно — на какую высоту такой зверек может взобраться?
Одно только название топика вштыривает :)
Чуствуется, что человек «заболел» этой темой.
Запланировал тест на следующие выходные, результаты добавлю в обзор.
либо кто то из автомата стреляет рядом, либо просто радиобомбы и звуки потом наложены
еще один из доводов с какой стати машина у него взрывается как в фильмах? от пуль никакой бензобак не взрывается, либо надо такой пулемет что эта штука не увезет… взрыв причем в центре салона… фуфло это киношное
Когда летает, тени не везде видны, например при пролёте окна. Возле машины не естественно двигается. Дым, осколки и пр.
Wi-Fi мне кажется совсем не лучшим вариантом для камеры.
Сайга и т.п. даёт такую такую отдачу при выстреле, что гиростабилизаторы будут весить порядка 10кг. Тогда уж, лучше шестиствольный пулёмёт, направленный чётко вниз))
при очередном краше будут еще небольшие «незапланированные расходы»… шучу-шучу: о)
Вот только комплектующие нужно использовать другого уровня, чтобы была уверенность в технике и руку набивать.
Но все комплектующие, кроме регулятора (и не надо меня переубеждать, могу опровергнуть ваши сомнения практически по всем пунктам, относительно регуля), относятся к разряду самых не выгодных в плане покупки, могу да же сказать самых дорогих с точки зрения эксплуатации, как говорится жадный платит дважды, а в этом деле и трижды, а то и больше.
По пунктам:
Рама дорогая, ремонто-пригодность так же дорого, особенно для новичков, используйте 450 или 550 (последнюю покупать в качестве доп. лучей)
Аккумуляторы тяжелые, дорогие, используйте компакты.
Моторы отвратительные, особенно использование цанг еще больше не желательно, пользуйтесь саннискаями.
Контроллер, хороша рабочая лошадка, но устарела, есть на много современней и интересней, очень большой выбор.
Регули, очень желательно прошивать. Не надо пугаться прошивки, все достаточно просто если будете внимательно следовать инструкциям.
Программатор вообще не востребован если будете прошивать регули, там есть своя программа для установки параметров.
На будущее развитие из бюджетных турниге 9Х равных нет, при условии использовании боди и комплекта фриски, а если апгрейдить, то вообще некоторые бренды по функционалу переплевывает на много.
Пропеллеры для начального уровня сойдут, но для последующего отжима лучших результатов (а они могут быть улучшены и в 2 и в три раза, как по тяге так и по времени полета) лучше пользоваться реально подобранной ВМГ, это очень таки сложно, но если вникнуть в тему, то на примерах можно получить очень хорошие результаты.
Пол года уже не в теме, по причине занятости и зимовке (забрасывать не собираюсь данное хобби), но вполне уверен, данная табличка еще актуальна для начинающих.
docs.google.com/spreadsheet/ccc?key=0AtW-OFUfUTMzdF8xLU9QZldMZ2dZQTRxdUpKSlpINWc&usp=drive_web#gid=0
В этой дтабличке имеются так же примеры разных пользователей, готовые конструкции и линки по этим данным, полистайте табличку, очень много полезного для себя найдете.
Был бы такой человек как вы рядом, когда я комплектуху подбирал… Я руководствовался бюджетностью, просто не хотелось собрать игрушку за $1000-1200 и потом закинуть ее на антресоль просто потому что «это не мое».
Но это оказалось мое ) Экшн-камера в пути, в планах Crius AIOP 2.0 (модуль GPS уже есть)
полтора кило для такого квадрика (точнее ВМГ) это очень много, надо худеть, выкидывай вашу чудо канопу, разные финтиклюшки, болты меняйте на пластик или алюминий, подбирайте провода по мощностям, все мелейшие изменения в весе в сумме помогут достичь очень хороших результатов по сбросу веса,
уверен, вы щас летаете примерно на 65% тяги, время полета в пределах 7-13 минут, зависит от одного из двух ваших аккумуляторов и пропеллеров, 8 и 9 пропы вообще использовать не будете, если только десятки в хлам не привратите
Пропы на 8' ставил, одного раза хватило чтоб понять))
Вчера выходил во двор поднастроить PID, 5000 был частично разряжен, с 16 до 14 вольт летал минут 8 в основном в режиме зависания с примерно 5-ю короткими посадками (для изменения настроек). Когда аккум разрядился потрогал моторы — температура была чуть холоднее температуры тела (на улице около +15)
Какие моторы посоветуете для моей конфигурации?
Здесь много примеров, попробуйте сориентироваться:
docs.google.com/spreadsheet/ccc?key=0AtW-OFUfUTMzdF8xLU9QZldMZ2dZQTRxdUpKSlpINWc&usp=drive_web#gid=2
Например мой конфиг ФПВ:
пример удержания позиции контроллером, смотреть после 2:30 видео, до этого настройка была и вывод на позицию
здесь с друзьями встретились и делились опытом :)
А если аппаратура управления телеметрию поддерживает, то напряжение выводится на дисплей передатчика + звуковой сигнал.
P.S. на видео(что на vimeo) на 02.50, когда садился… чего его так дернуло?
Компенсировал ваш отрицательный рейтинг +1.
Иду по твоим стопам.
Любые симуляторы на компьютере ни в какую не дадут навыков пилотирования.
Лучшим симулятором, для получения скила пилотирования является модель квадрика жука.
Данный аппарат имеет только гироскопы, его приходится постоянно держать в горизонте, тем самым развивая навыки пилотирования. Получив опыт управления данным аппаратом, вы избавите себя от будущих огромных затрат во время крашей более дорогих ваших аппаратов и аппаратуры на борту.
Настоятельно рекомендую сей чудо аппаратик :)
К тому же, именно этот аппарат имеет выше описанное исключение при совмещении со стандартной аппаратурой Турнига 9Х
Бывают ли контроллеры, способные управлять огибанием препятствий типа линий/опор/деревьев и предотвращать столкновения со стенами?
На апрельском кураже не вы ли жужжали?
В люди еще боюсь выходить — засмеют )
Телевизор жалко, это да. И потолок.
На видео вначале напрягло, что испытываете аппарат под ЛЭП, но потом понял, что рука уже немного набита.
Симулятор помог?
Считаю, что симулятор весьма помог в управлении, когда аппарат к тебе передом и вперед-назад, вправо-влево меняются местами.
некоторым делать нечегоу некоторых много свободного времени. И я как понял за полгодаещё многое не успели реализовать… :)
Поиском в теме найти не удалось чем отличается 2.0 от 2.1.5.
я так понял гиро и аксели теперь на одном чипе?
или остались тока аксели?
что лучше взять новичку 2.0 или 2.1.5? (2.0 правда найти в продаже не удалось)
спасибо
Деточка, будьте точны в мелочах. Не апеллируйте токами 25, 30 и, тем более 150 А!!! Или это к примеру было? От фонаря? И двигатель не выйдет из строя от перегрева — контроллер, скорее, сдохнет. Квадро — окто нормально падают с ЛЮБОЙ высоты. В режиме ротации. Если Вы не пожмотились на лопастях. Ни хрена себе — расходный материал!
У дураков и пенис — расходный материал.
Обзор кому-то и пригодится… Много слов и ни какой конкретики от себя. Ударили бы по конечному :-)).
Всё видео висит. Хватанул win32 с Вашей помощью. Почистился. Пробовал сразу другое видео — нормально. И пепси (или кола). А с Вашего — сразу тормоза.
Но, всё равно, с уважением
Если верить вашим же словам, то вам 58±2 года, мне к вам «папаша» обращаться? А какими еще единицами мне оперировать, если ими весь RC мир оперирует, если эти характеристики указаны в описании оборудования? Попугаями?
Упрекаете в безграмотности, а сами в элементарных вещах не можете сориентироваться. Контроллер вы, видимо, с регулятором перепутали? Мультироторы, говорите, нормально падают? В спойлере видео с YouTube, но вам советую не смотреть, вдруг опять вирусы. На словах скажу, что ротация далеко не всегда возможна — столкновение с препятствием, отказ электроники, потеря сигнала и др.
Видео, используемое в обзоре, располагается на YouTube и Vimeo. Претензии по поводу вирусов к владельцам хостов. По поводу скорости — к провайдеру. И пепси(или кола) — это вообще о чем?
Лицемерие?
Только зарегистрированные и авторизованные пользователи могут оставлять комментарии.