Небольшой квадрик YH-13HW (Записки начинающего)

- Цена: $ 42.99
- Перейти в магазин
Авиамоделизм в классическом понимании ранее представлял из себя как правило модели самолетов и значительно реже вертолетов (автожиров). Связано это было с техническими трудностями, которые с появлением новых технологий ушли в прошлое. Что бы не остаться в этом прошлом, было решено сделать хоть какой то шаг вперед, а именно попытаться приобщиться к миру квадрокоптеров.
Напомнило известную фразу: «Нужно бежать со всех ног, чтобы только оставаться на месте, а чтобы куда-то попасть, надо бежать как минимум вдвое быстрее!» @Льюис Кэрролл.
Выбор квадрокоптера был немного спонтанным. Советов особо спрашивать не у кого. Одни давно переросли маленькие коптеры и летают на больших. Другие говорят — надо брать маленький для полетов по комнате, третьи — бери сразу с ФПВ (возможность полета по камере). Сколько людей, столько и мнений. Решено было брать с небольшим запасом по возможностям. Летать по комнате мне банально негде, поэтому этот вариант отпал сразу. Большие коптеры имеют большую цену и не факт что я привяжусь к этим летательным аппаратам, а потом появится проблема с продажей, а может и до продажи не дойдет (сломается там или улетит куда, и так бывает). Опять же на слуху стабильно проблема больших коптеров с таможней и регистрацией (превышение веса более 250 грамм). В итоге взял квадрик с функцией ФПВ в усеченном виде — в качестве дисплея используется смартфон. Управление возможно как с пульта, так и со смартфона (что будет удобнее, на том и остановимся). Поскольку я привык к пульту с режимом mode 2, то и квадрик был выбран с тем же режимом управления. Так же важным моментом для себя посчитал наличие гироскопа, а лучше не одного, а сразу несколько. Их присутствие значительно облегчает управление. Очень полезным был бы зип комплект включающий в себя запасные винты как наиболее часто востребованные. По цвету было пожелание взять что то яркое, пусть не такое красивое, но что бы было заметно на фоне неба, ну и в траве конечно -)
Запись видео и фотографий дело конечно интересное, но на первый момент совсем не обязательное, поэтому при наличии функции ФПВ прилагается зачастую бесплатно. Отдельное слово о зарядке — любой повербанк может быть источником энергии для аккумулятора и не требуется «коробка-зарядник». Это поможет на первых порах обойтись одним аккумулятором.
Немаловажный фактор был — цена. Разумный баланс между возможностями и ценой.
С мотивацией и желаниями вроде разобрался, теперь перейдем непосредственно к самому квадрокоптеру, на который пал выбор. Это, насколько я понимаю новинка на рынке и я поступил немного оплошно, поскольку не имея опыта столкнулся с проблемами, которые при покупке распространенной модели могли бы быть сразу решены (иногда на месте). Речь пойдет о небольшом квадрике с названием YH-13HW, модификация с управлением по WIFI и встроенной камерой. Существуют варианты без поддержки WiFi, а так же без камеры. Цена соответственно ниже. Основные данные и характерискики можно найти на сайте продавца.

На вид пакет целый, но прощупываются небольшие повреждения упаковки.
Открываем:
Вот такой вот кубик из картона.

По линии пунктира отрываю картон, под ним пленка, которая сразу придает коробке вид как из магазина. Внутрь уже можно заглянуть.
Хорошо, что содержимое коробки оказалось целым.
Детям младше 14ти лет по заявлению производителя здесь делать нечего.

Квадрокоптер зафиксирован проволочными стяжками к коробке. В нижнем отсеке находится инструкция ( скачать с яндекс диска ), пульт управления, шнур с зарядным модулем по USB, клипса для установки на пульт смартфона и зип комплект в отдельном пакете.

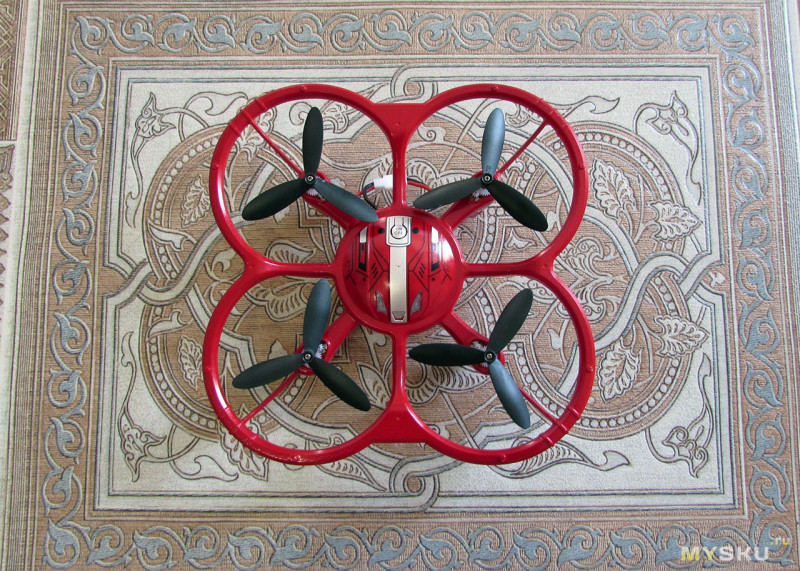
Несколько фотографий с разных ракурсов:
Размеры 15.5см х 15.5см х 3.5см, вес 65 грамм.

Цвет выбрал красный, кроме того существует вариант в черном цвете.
По центру, на спине кнопка включения.
На «пузе» уже поинтереснее, видно по периметру защитного кожуха наличие светодиодов. Нижняя крышка имеет вентиляционные отверстия, в том числе и в зоне двигателей. Квадрик имеет 4 силиконовых ножки. При жесткой посадке они обязательно должны помочь.

Так же видно батарею емкостью 380 мАч и силовой разъем.
При разряде током 1А емкость составила почти 400 мАч. Проверка емкости по сути не важна, поскольку вполне допустим некоторый разброс по емкости от партии к партии.

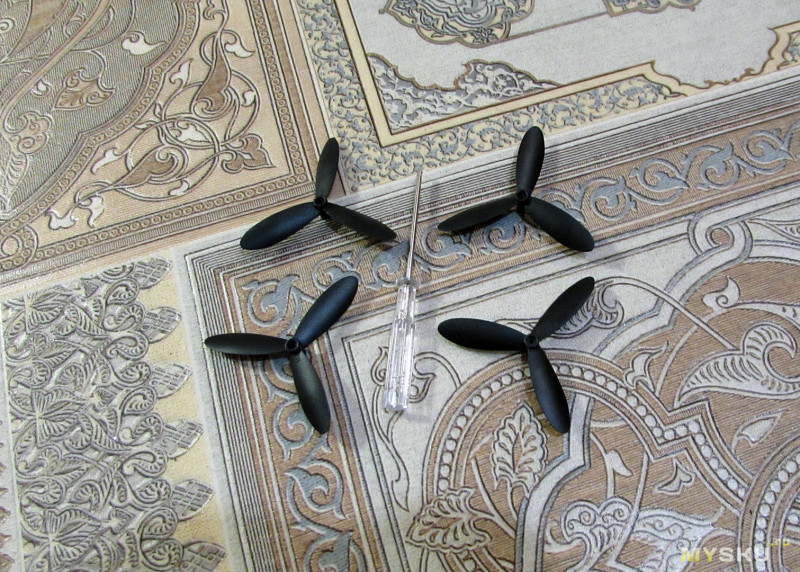
Положительным моментом хочу отметить зип комплект, который включает в себя набор из 4х запасных винтов и небольшой отвертки для облегчения замены сломанных.
Зарядка осуществляется кабелем подключаемым к USB порту. В момент полного зарядка красный светодиод тухнет.
В поле можно взять в качестве подзарядки повербанк емкостью не ниже 2000 мАч, которого хватит на 2-3 полноценных зарядки штатного аккумулятора.

Винтомоторная группа:
Наличие редуктора вынужденная жертва в угоду КПД всей установки в сборе. При наличии небольшой крестовой отвертки весь квадрокоптер можно разобрать на детали. Кстати, моторы коллекторные. Других вариантов исполнения мотора нет. Для замены винта достаточно открутить саморез и вытащить поломанный винт.

«Пузо» более детально:
Два отсека для установки аккумулятора и установки карты памяти. Слева расположена антенна, а напротив карты памяти камера с разрешением HD. Угол наклона не изменяется. Жесткая фиксация.
Кстати корпус коптера — ударопрочный пластик. Изначально я подумал что алюминий.

Пульт поражает обилием кнопок, но основные органы — ручки классической компоновки. В моем варианте газ справа (mode 2). Частота 2.4 ГГц.

Стики можно подобрать по высоте, поставив один на другой.

Питание пульта — 4 батарейки типоразмера АА. Крышка фиксируется винтом.

Вариант с установленным смартфоном и запущенным приложением YH-FPV
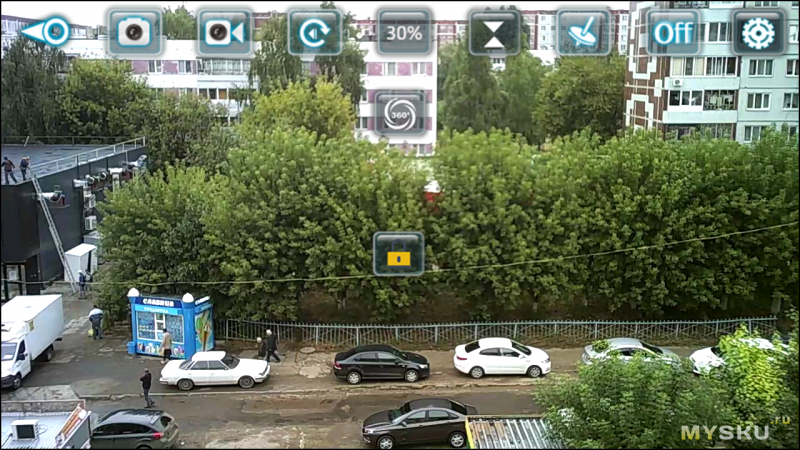
Рабочая картинка приложения для FPV

Приложение доступно для скачивания в Google play. Есть так же вариант для Iphone и Ipad. Ввиду отсутствия последних не проверял.
Первое включение дома с использованием смартфона в качестве пульта. Не разобравшись до конца с обилием кнопок пытался управлять, но коптер взлетев на 30 см от пола забился в угол комнаты и стал настойчиво долбиться в стену. Экстренное выключение. Проанализировав ситуацию произвел некоторые настройки, а именно выключил режим инверсии, я попробовал снова включить. Добился стабильного зависания в одном месте, но при попытке перемещения коптер вел себя неадекватно. К тому же по сравнению с моделью самолета, у которого есть ориентиры куда он летит, у коптера все симметрично. Я просто запутался в управлении. очередная экстренная посадка. Кроме того высоту пытался удержать датчик давления. На небольшой высоте под квадриком создается повышенное давление, поэтому умная электроника думает что квадрик падает. И начинаются хаотичные прыжки невысоко от пола. Но через некоторое мгновение электроника выравнивает показания и квадрик застывает на одной высоте.
Следующие полеты проходили уже увереннее и я решил проверить работу с пультом. Тут у меня получился в управлении качественный скачок и я даже смог полетать по квартире не задевая стен. Виновником плохого управления оказался смартфон Doogee X5, у которого тач на 2 касания и возможно у конкретного экземпляра проблемы с самим тачем (хотя в повседневной эксплуатации проблем не замечено). Позже по квартире я пробовал полетать с Lenovo S820 и Doogee X5 MAX Pro. Проблемы не наблюдались, хотя с пультом лично мне все же удобнее оказалось.
Робкие попытки полетать на улице. Небольшой «бриз» 1-2 м/c не был для меня помехой. Я успешно с ним боролся и даже летел против ветра. Однако по мере расхода батареи квадрик становился вялым. В конце разряда батареи набор высоты был затруднителен. Квадрик перешел в режим посадки и аккуратно сел в траву. Ну как аккуратно — сломал лопасть одного винта, но только из-за того, что сел на засохший стебель какого то сорняка. Дуги безопасности не помогли, поскольку помеха оказалась снизу. Общее время полета составило около 5 минут. Во время полетов я иногда использовал смартфон и нажимал кнопки камеры, как съемка фото, так и видео, но ничего не получалось. Позже уделив больше времени программе я нашел каталог с фото и видео на флешке смартфона, где все же было несколько фотографий. Поскольку они сделаны хаотично, то смысла их выкладывать я не вижу.
На фото можно увидеть расстояние на которое настроен фокус

Скриншот в облачную погоду с высоты около 5-7 метров

Ночью с высоты 15ти метров.

Удивила чувствительность камеры в вечернее и ночное время. Сделал несколько снимков. По качеству они напоминают видеорегистратор. Предположу что на объективе нет инфракрасного фильтра. Некоторые вещи что видно на картинке, невооруженными глазами разглядеть невозможно.

Все эти плюсы мало реализуемы, поскольку ночью запускать квадрик нереально и даже днем на расстоянии 15 ти метров управлять крайне затруднительно из-за небольших размеров.
Скриншот с самого смартфона с запущенным приложением.
Высота все та же 15 метров.

Съемка фото и видео:
На пузе квадрика есть место под карту памяти. Вытащил первую попавшуюся со старого планшета и поставил. Это была Кингстон 4го класса на 8 гигабайт. И опять у меня ничего не получилось с видео и фото. Я не понимал что происходит. Методом научного тыка я определил, что необходимо было отформатировать карту памяти. Производить фотографирование можно при управлении со смартфона без наличия карты памяти в коптере, а вот запись видео недоступна. При наличии карты памяти коптер все данные пишет себе, а позже через программу можно произвести редактирование, копирование на смартфон (планшет) и удаление.
Попытки съемки видео часто приводят к падению. Пропадает сигнал, при этом коптер продолжает последнее движение, которое было задано до потери сигнала. Восстановление связи происходит долго, за это время коптер успевает упасть. Плюсом оказалось то, что ни одна деталь до сих пор не поломалась. Велика вероятность того, что очень сильно забит диапазон WiFi, особенно около многоквартирных домов. Так же дальность и стабильность управления и записи видео зависят от смартфона и уровня сигнала.
После падения квадрик летает нестабильно, пытался по самолетному триммировать, но оказалось надо перенастроить гироскопы и все заработало.
На данный момент я могу летать «блинчиком» и делать простейшие движения, поэтому видео не такое информативное, как на сайте продавца. Боюсь к моменту полного освоения коптера, последний или сломается или обзор сильно устареет и станет неактуальным.
Дополнение: Можно летать и более агрессивно, оказывается я летал на 30% расходов.
Ввиду небольших размеров и веса летать можно на открытом воздухе в штиль или с ветром не более 1-2м/c, при более сильном ветре весь «кайф» от полета сводится к жесткой борьбе с ветром и попытке удержать квадрик на одном месте или даже двигаться навстречу. Думаю в таких тяжелых режимах можно быстро набить руку в управлении, равно как и совершить десяток — другой падений квадрокоптера с некоторой вероятной поломкой.
Видео:
Распаковка
Работа камеры днем и ночью с высоты 15 метров
Первые попытки полетать на улице (навыков управления квадриком практически нет)
Первоначально ставилась задача не улетать далеко и за спину
Полеты на природе и падения — причина всегда одна, потеря связи со смартфоном. С пульта управление стабильное.
Поскольку на открытой местности постоянно ветерок и даже более сильные порывы, то сделал попытку полетать в лесопосадке
Пара неудачных видео, вид с камеры квадрика. Падения из-за потери сигнала WiFi.
Камера пишет в формате HD 20 кадров в секунду, потом 4 мбит. Моя программа по работе с видео отказалась воспринимать видео с коптера, поэтому выложил как есть, без обработки. Разницы между оригиналом и видео на ютуб практически нет.
Увидал я на местном водоеме уточек и решил поснимать. Однако на высоте есть порывы ветра и снять видео не удалось. Занимался борьбой с ветерком, которую я проиграл.
Пока разбирался с управлением и набивал руку, пробовал летать недалеко от дома, где есть мало мальски свободный участок.
Так что смарт и управление с него только в помещениях или вблизи. Вполне очевидно.
Заключение: Вполне годный аппарат. Время полета около 5 минут на полном газу. Требователен к смартфону (нужен хороший тачскрин). Можно заряжать в поле взяв с собой повербанк. Достаточно не убиваемый, поможет набить руку в управлении. Подсветка квадрика позволяет управлять в пасмурную погоду или даже немного в сумерки.
Положительным моментом считаю наличие запасных винтов, так же в комплекте есть небольшая отвертка.
В квадрокоптере заложена функция переворота, но я ее реализовать не смог, и даже дело не в том, что мне жалко сломать игрушку, сколько в том. что эта функция в приложении не работала. Прошло уже несколько месяцев, скорее всего приложение «допилили». Ведь на улице уже снег, на на фото и видео — лето.
Headless режим не обнаружен, его присутствие вопрос спорный, мне он точно не нужен.
Сделать запись видео без использования смартфона не удалось. Возможно софт в пульте не доработан. А если вам надо видео, то готовьтесь к небольшому радиусу действия из-за ограничения дальности WiFi.
ps.На данный момент на квадрик скидка и цена $29.99 Тег «промо» у товара отсутствует, поэтому можно применить какой либо купон или поинты. Как их набрать уже обсуждалось ранее.
| +31 |
1942
61
|
| +46 |
3696
92
|
Сайт MYSKU.club cоздан для обзоров товаров, заказанных в зарубежных интернет-магазинах AliExpress, Amazon, Ebay и других.
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку.
Если Вы купили что-то полезное, то, пожалуйста, поделитесь информацией с другими.
Также у нас есть DIY сообщество, где приветствуются обзоры вещей, сделанных своими руками.
-
1026.32
Скидки и распродажи

-
445.39
AliExpress

-
273.05
DIY, или Сделай сам

-
187.28
Ebay

-
179.74
JD.ru

-
155.08
Магазины Китая

-
98.02
Новости сайта

-
77.49
Другие магазины
-
71.57
Магазины России и СНГ

-
68.46
TaoBao

-
TSA → Ломаем еще один квадрик: вандализация с элементами реверс-инжиниринга
-
radmir → Обзор недорогого ноутбука Ninkear N15 Air на Intel N95
-
DrSleep → Обзор измерителя внутреннего сопротивления аккумуляторов HT-RT01
-
HexeN → Универсальная плата BMS 100A для 3S/4S/5S LiFePO4 или Li-Ion.
-
MrBoston → Пенал для канцелярских принадлежностей от Hongdian
-
darken123 → Велосумка на руль "Кармашек" типа фитбег, кормушка от malpa.by
-
Evlampy → Налобный фонарь Wurkkos HD20, аккумулятор 21700, два светодиода, обратная зарядка, магнитное крепление за 2566 руб
-
serge_petrov → Камера микроскоп с матрицей Sony IMX307, авто фокус, серия первая.
-
lexus---08 → Обзор ноутбука Ninkear A15 Plus (Ryzen7 5700U, 15.6" IPS FullHD)
Традиционно, малое время полета огорчает.
Большое спасибо! :)
Наконец — пылесос 90% времени работает на холостых. Уприте его в ковер — пусть нагрузка будет, как у квадрика перманентная. Сомневаюсь что он так 25 лет выдержит.
по долгу своей работы, я обслуживаю двигателя вентельные, ДПТ, асинхронные, асинхронные с фазным ротором и пускорегулирущую аппаратуру
посчитайте какой ток нужен для мощности 500 вт, при напряжении 7 вольт. какое сечение провода нужно??
ресурс выше? но выше цена на двигатель и контроллер(привод).
я обслуживаю двигателя до 1000в и коллекторные и с постоянным магнитом на роторе и асинхронные и системы управления этими двигателями.
В хоббийных аппаратах конечно никто коллектор точить не будет, моторы по 10$ за пучок.
Сечения проводов обмоток- в пределах 1-2мм2. Витков на статоре- от 1 до 15-20 в зависимости от назначения мотора. Мотор рассчитан на кратковременную работу -10-20 мин, с активным охлаждением. И да, это почти расходка. Коллекторные точно расходка.
Только зарегистрированные и авторизованные пользователи могут оставлять комментарии.