Новые регуляторы оборотов для гоночных квадрокоптеров на процессоре F3. Furling32!

- Цена: $14.99
- Перейти в магазин
Сначала я хочу начать с небольшого объяснения что же такое эти регуляторы оборотов, потом перейти к характеристикам, а уже далее осмотр и настройка.
Краткие характеристики Furling32
— 32-х битная прошивка (BLHELI32)
— Поддержка полной телеметрии
— Процессор F3
— Рабочий ток регулятора 35А
— Наличие датчика тока
— Наличие настраиваемого RGB светодиода
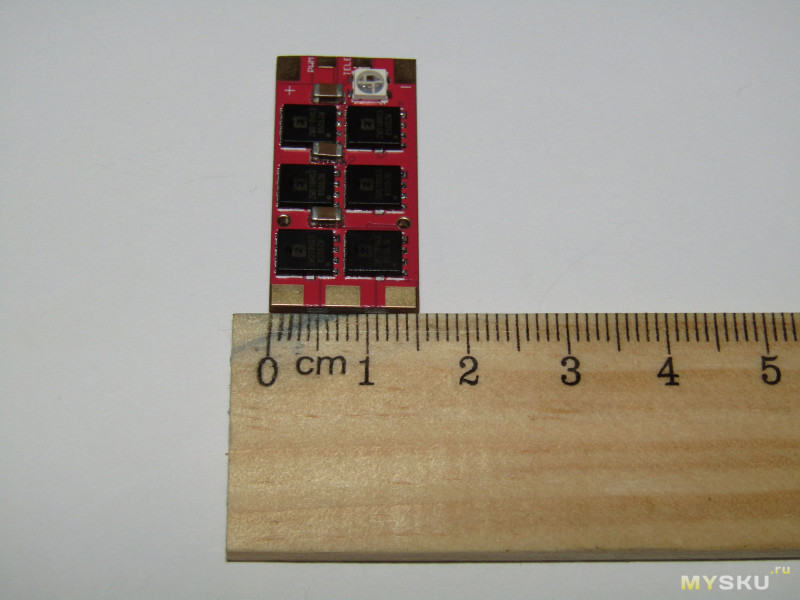
— Размеры 15х30 мм
Что это даёт?
Более скоростные протоколы передачи управления и телеметрию регуляторов. Как пишут производители и разработчики прошивки, ПК получая данные телеметрии ориентируется на температуру и токопотребление, благодаря этому производит более чёткий контроль управление и в случае выхода показаний за рамки прекратит подачу тока и убережёт ваши компоненты. Но это на словах, реально подтвердить или опровергнуть пока что я не могу. Однако уже сейчас можно в настройках выставить ограничение по току, за пределы которого не выйдет регулятор оборотов. В данное время если установлен более мощный процессор, а в нашем обзоре именно так и есть, то можно выставить более высокие частоты переключения фаз тем самым добиться ещё более большой плавности в работе.
Сразу предупреждаю это то, что можно найти в интернете и то, что нам дают разработчики этой прошивки и компонентов, реально же проверить все у меня просто нету такой аппаратуры, по этому это некая теоретическая статья о том, что же такое BLHELI32.
Осмотр посылки и регулятора оборотов.
Как обычно компания Airbot поставляет свои компоненты антистатических пакетах. Это является большим плюсом, так как можно не бояться, что где-то по дороге статическим электричеством повредило какой-либо элемент на плате.
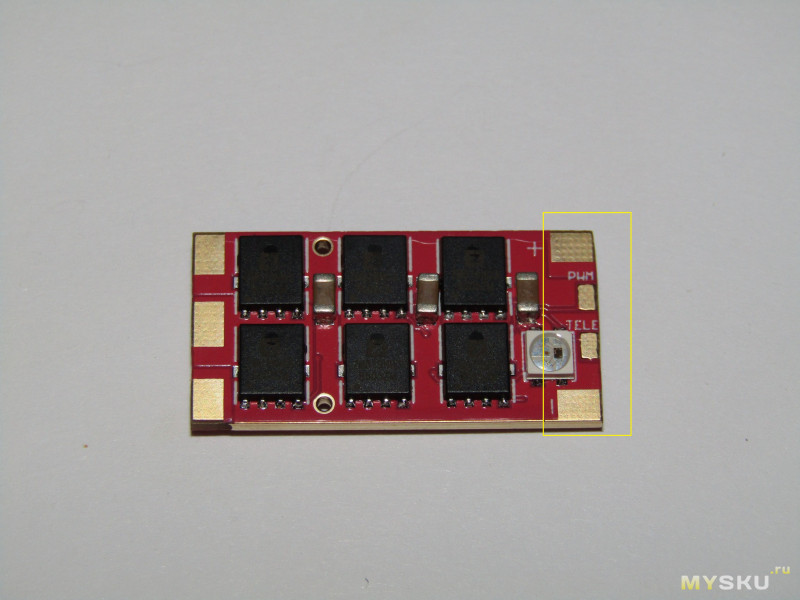
Достанем регулятор и посмотрим с двух сторон. Как можно заметить компонентов не так-то и много, но они очень интересные.
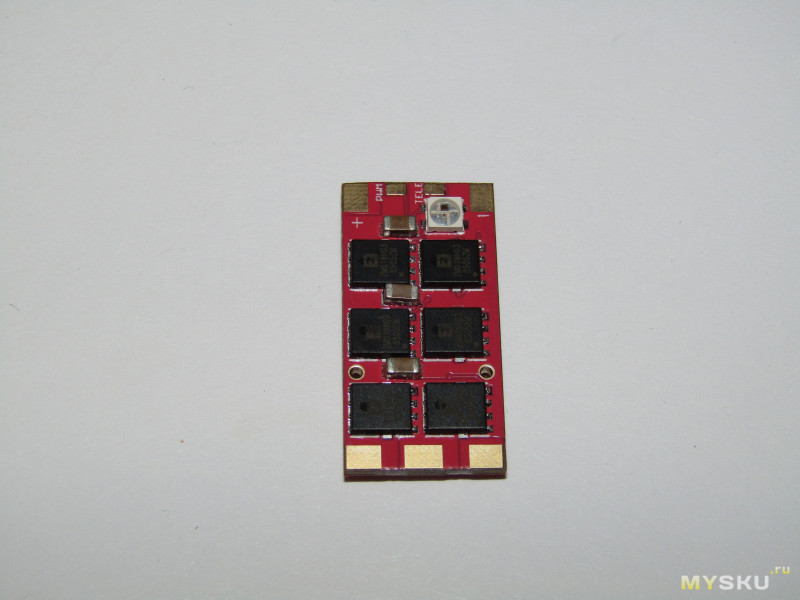

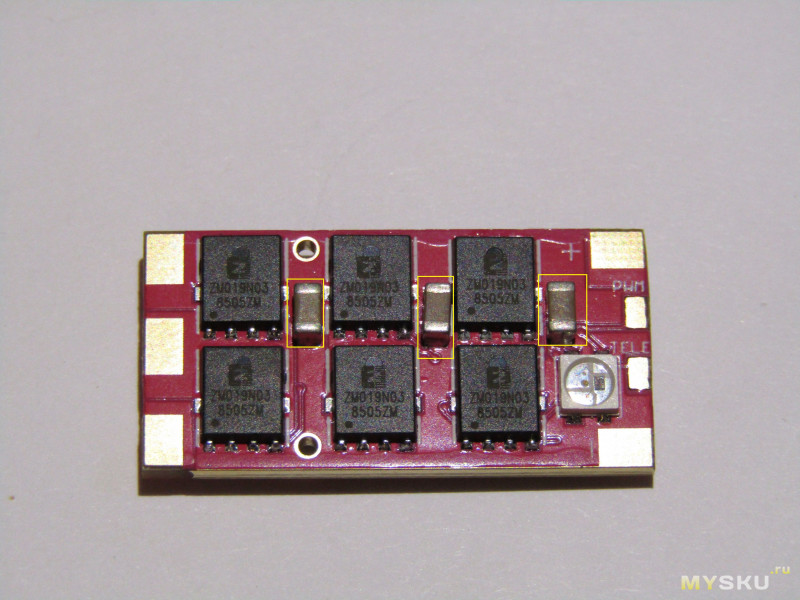
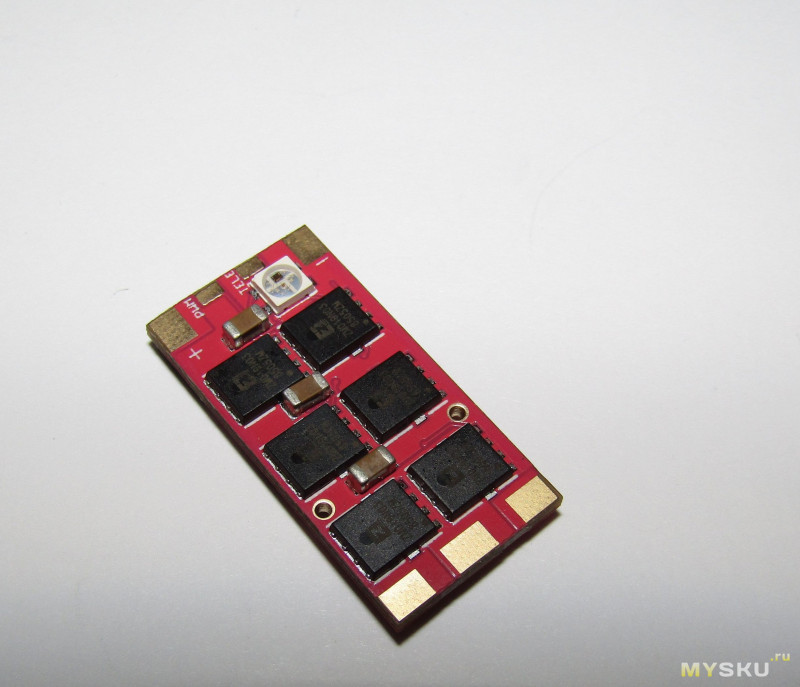
Подробный осмотр предлагаю начать с верхней стороны (где установлен RGB светодиод и мосфеты).
С лева находятся пяточки для пайки проводов которые идут к мотору. Если внимательно присмотреться, то видно, что для пайка оголена не вся дорожка, и соответственно ширина же дорожки шире и говорит нам о том, что производитель оставил запас и прогара дорожки от высокого тока не должно случиться.
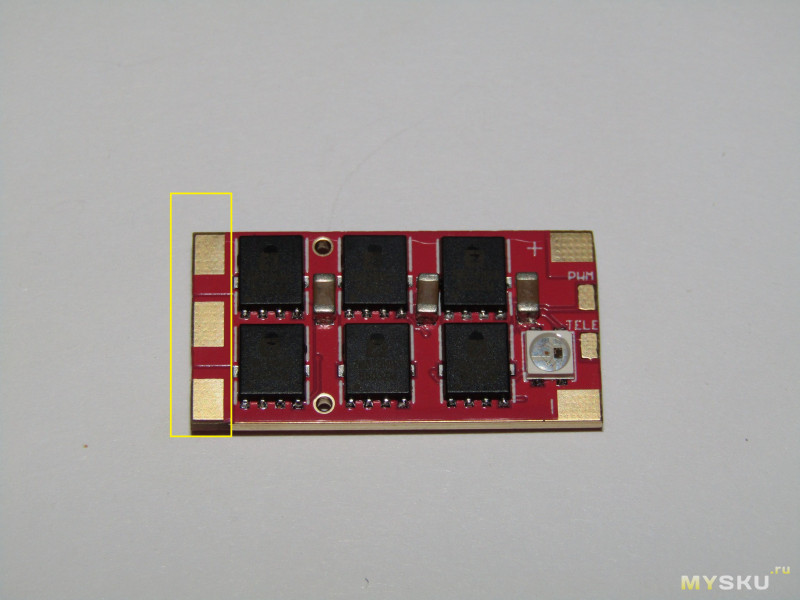
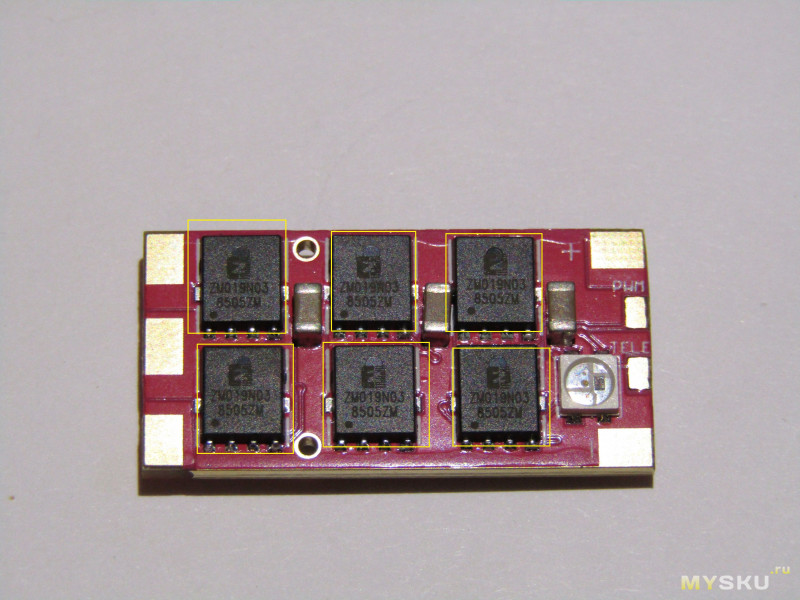
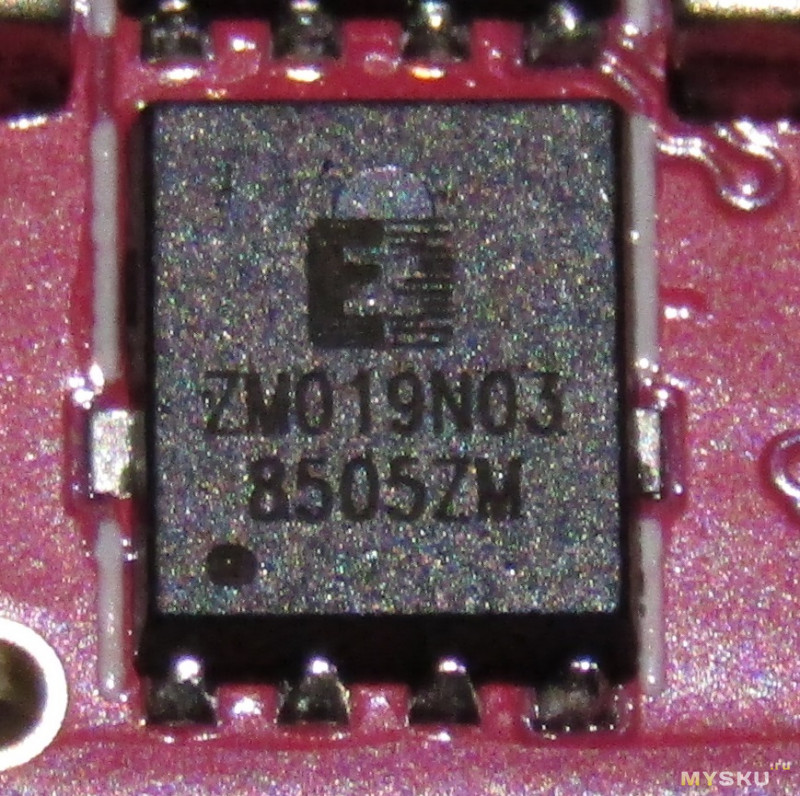
Далее идут 6 мосфетоф. Маркировка ZM019N03 8505ZM, к сожалению найти даташит мне не удалось. Производитель обещает, что регуляторы рассчитаны на ток 35А.
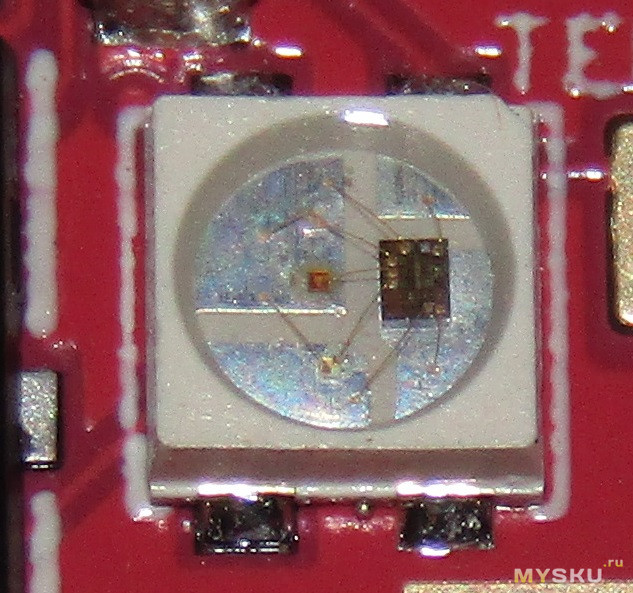
Далее в глаза бросается RGB светодиод. Использовать его или нет каждый принимает индивидуально. Настраивается он в программе где настраиваются и другие параметры регулятора, об этом будет ниже.
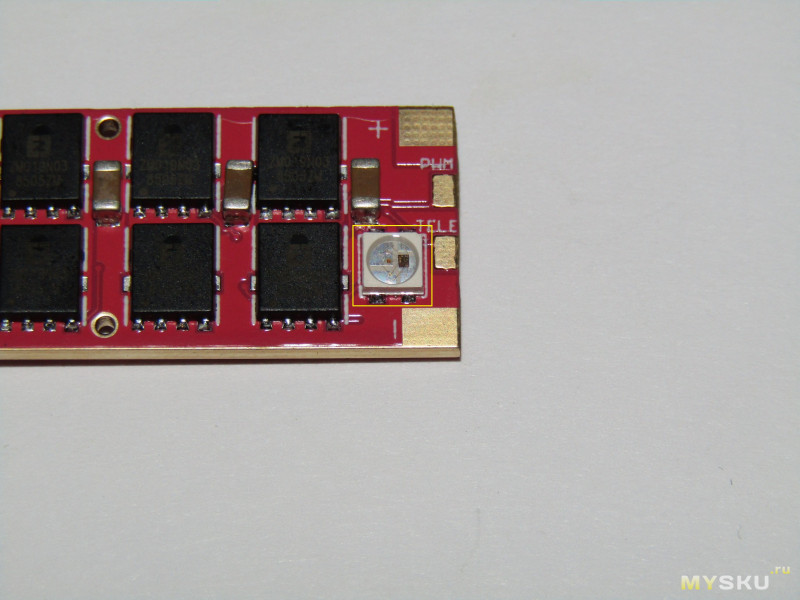
С права находятся 4 пяточка. Описание идёт сверху вниз.
+ Плюс питания.
PWM контакт на которой приходят данные с какой скоростью надо вращать мотор. Проще говоря управляющий контакт и паяется к управляющему выходу на ПК (полётный контроллер).
TELEM контакт телеметрии. С него мы можем получать информацию об температуре регулятора, оборотах. Паяется на TX пин любого свободного UART порта на ПК. (Об этом ниже будет отдельное упоминание).
- Минус питания.
Так же сверху находятся 3 smd конденсатора.
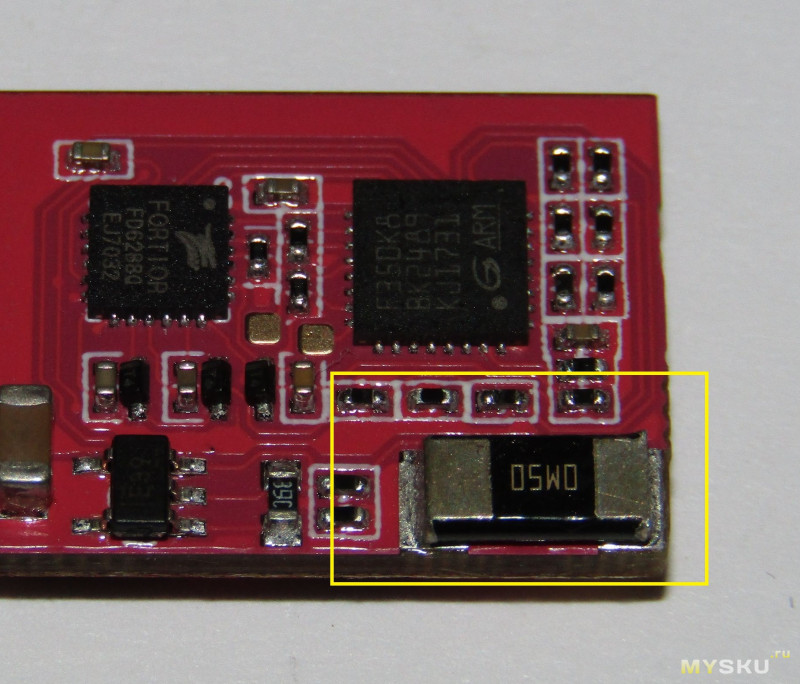
Теперь перевернём регулятор и посмотрим с другой стороны его.
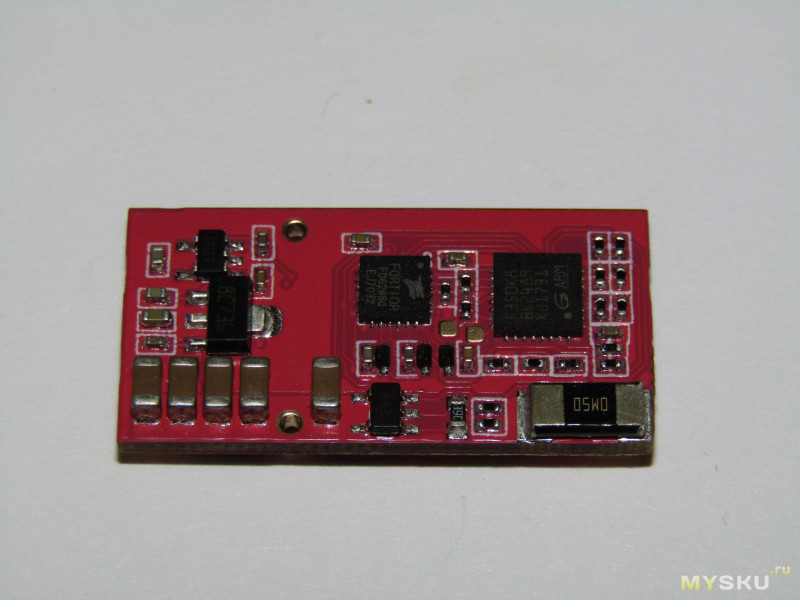
Поговорим о компонентах. Датчик тока или шунт. Даёт возможность через телеметрию получать данные о потребляемом токе конкретного регулятора.
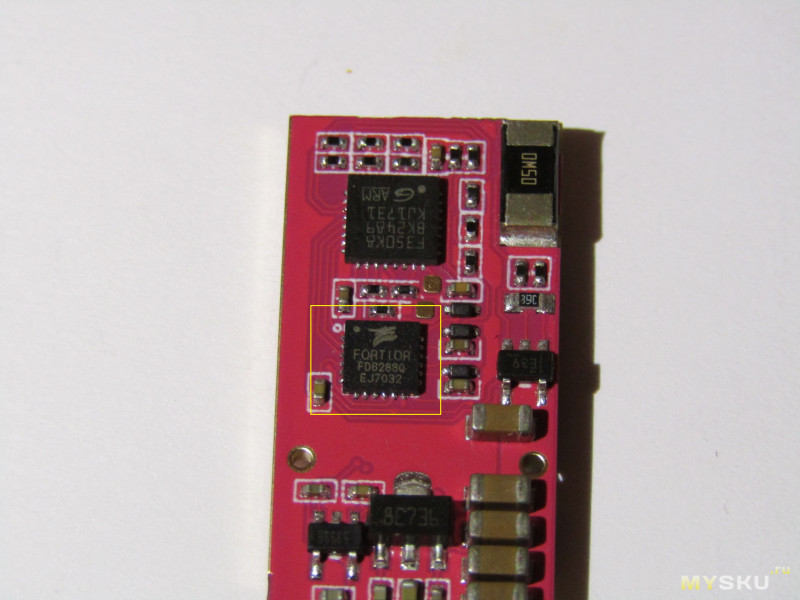
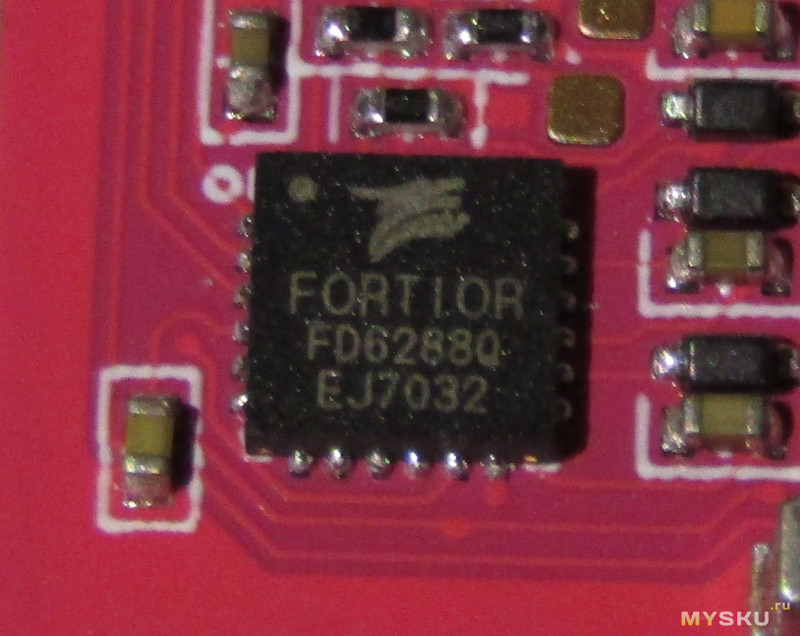
Драйвер ключей (мосфетов) Fortior FD6288Q
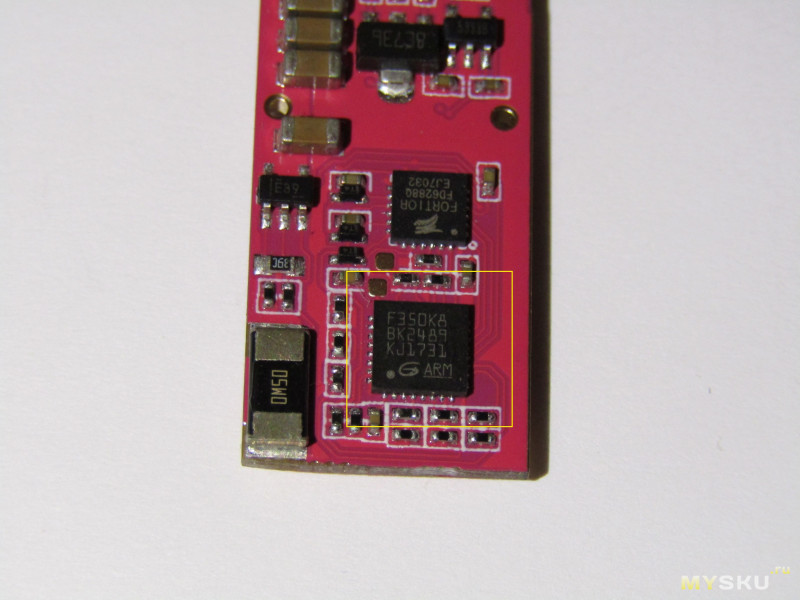
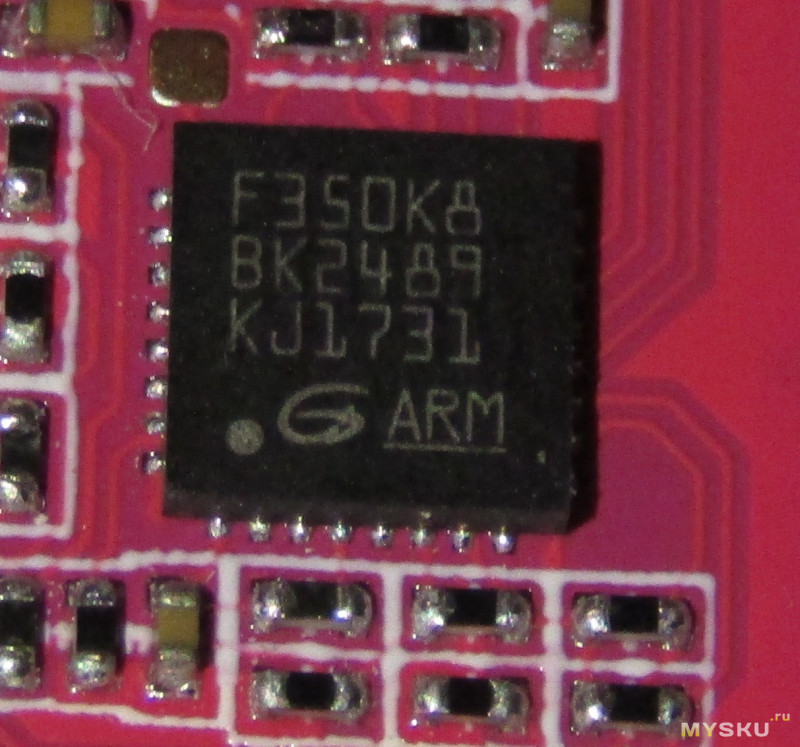
Теперь о самом главном! В качестве процессора регулятора используется чип F350. Это процессор семейства F3. Что бы простой пользователь понял почему же такое внимание уделено ему. Постараюсь объяснить, до этой модели регуляторы использовали процессоры линейки F1, а буквально года 1,5 назад процессоры семейства F3 устанавливались на одни из самых крутых ПК, да и посей день F3 процессоры используются на простых ПК где не нужна сильная производительность. Так, что если немного поразмышлять, то в таком решение кроется огромный потенциал, который к сожалению ещё не полностью использован, но будем следить вместе за развитием технологий в этой области.
Так же на обратной стороне находятся пара конденсаторов, элементы обвязки процессора и драйвера, стабилизатор питания (LDO).

Предлагаю ещё пару фоток под спойлером, что бы оценить качество пайки, и просто сборки. Хочется отметить что платы отмыты превосходно.

Размеры
Длина регулятора составляет 30мм.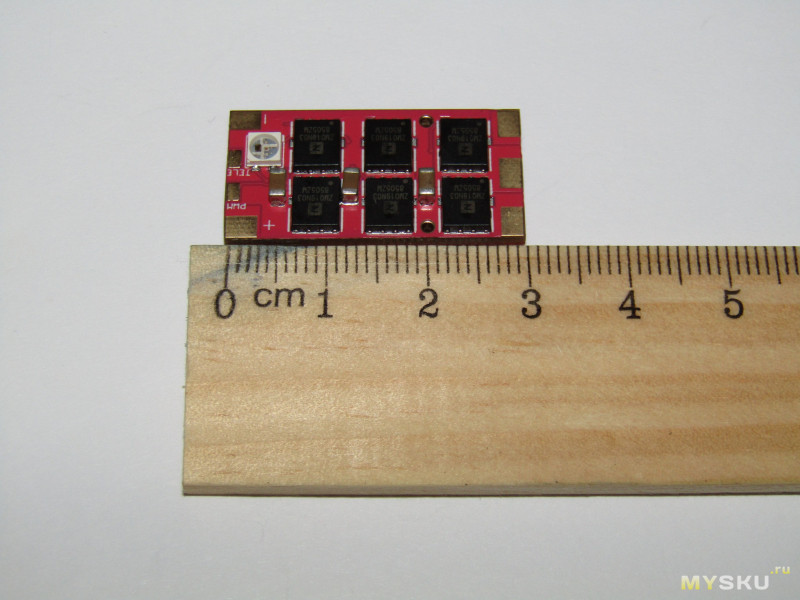
Ширина 15мм.
Настройки
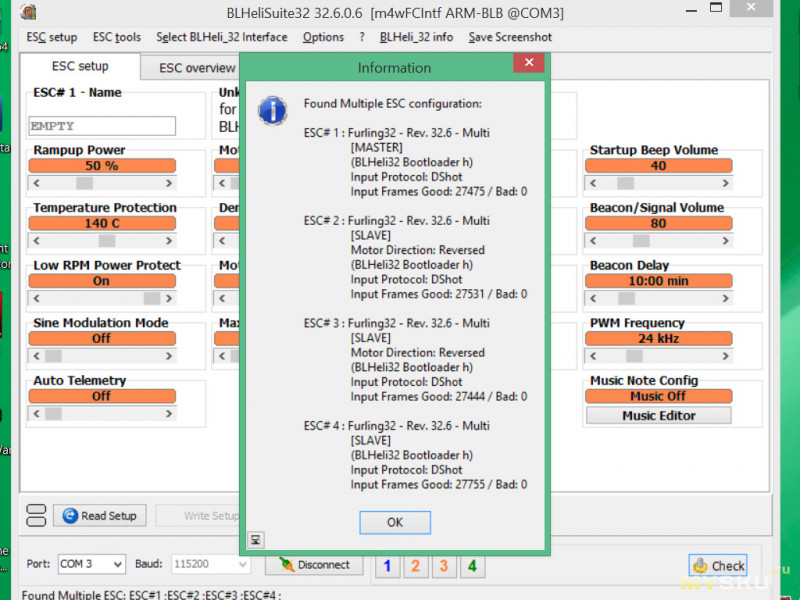
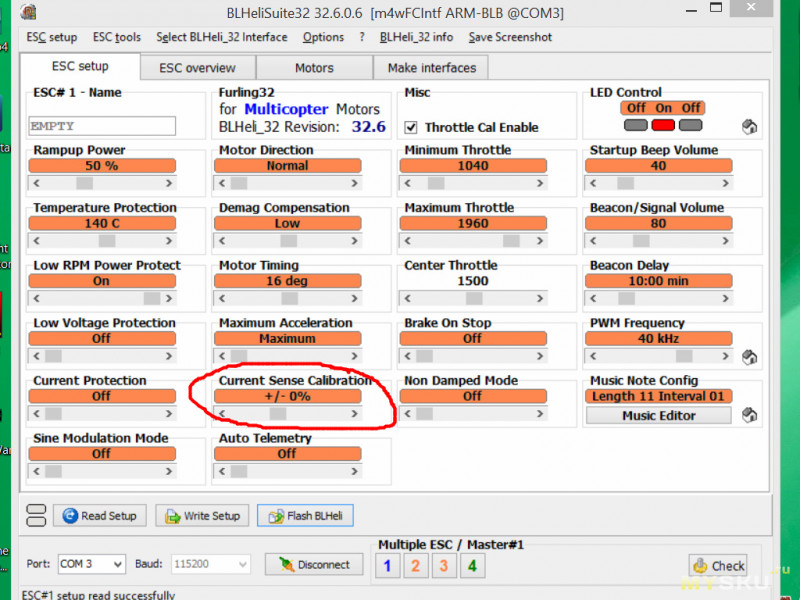
Для того что бы попасть в настройки надо скачать BLHeliSuite_32. Регуляторы должны быть уже припаяны к ПК и всё. Открываем программу, подключаем аккумулятор к квадрокоптеру, выбираем com порт и жмём подключиться.Дальнейшее описание настроек я спрячу под спойлер дабы не растягивать обзор.
У меня уже зашита версия 32.6 и все 4 регулятора читаются программой.
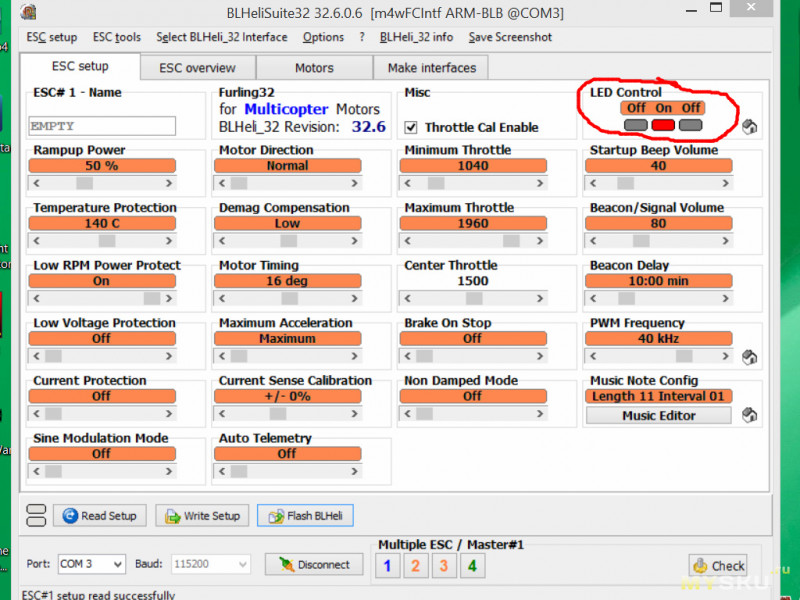
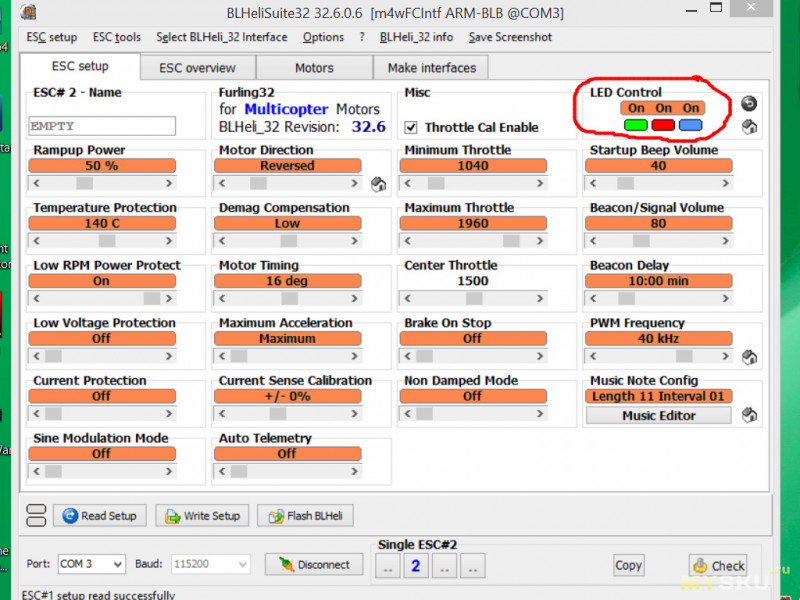
Начну с настройки светодиода. На выбор доступно любое сочетание RGB света. Можно оставить открытым светодиод и тем самым сделать небольшую подсветку на квадрокоптере. Думаю тем кто летает по несколько человек будет удобно.
В новой версии прошивки появилась возможность корректировать показания каждого датчика ток, что очень удобно если при стандартных значениях датчик начинает врать.
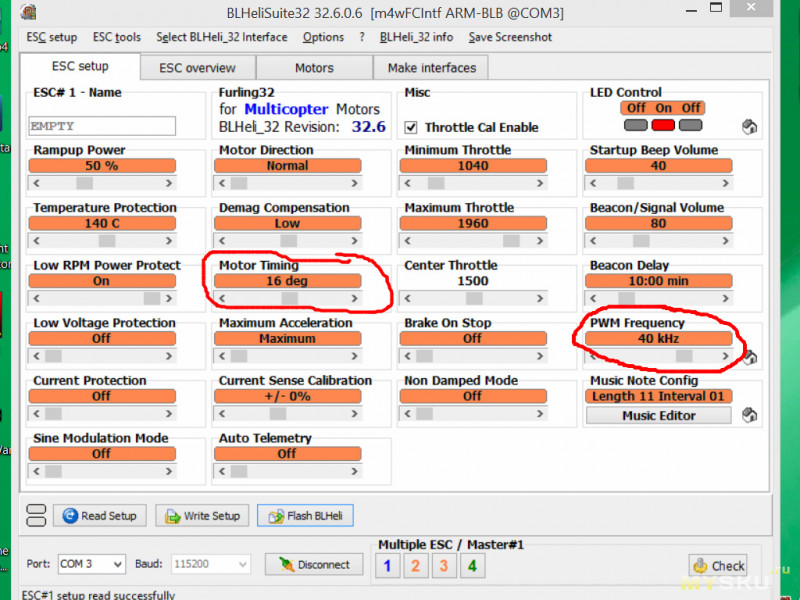
Теперь два пункта которые влияют на плавность и мощность.
1) Motor Timing, этот параметр позволяет расширить диапазон газа. Рекомендуется выставить автоматический режим, тогда теоретически нам будет доступно более максимальное значение газа. Я не стал трогать этот параметр, так как при увеличении мощность пойдёт и большой нагрев и т.д., а мне жалко моторы и регуляторы, по этому я оставил стандартные значения.
2) PWM Frequency, грубо говоря чем выше значение тем плавнее будут крутиться моторы. Для себя я поставил значение 40, так как мне показалось это оптимальным, достаточно плавно, но при этом нету эффекта как будто летишь в масле.
Прошивка
Теперь о прошивке. Для неё есть одно требование, это наличие интернета, без интернета прошивка не пойдет, так как запрос отправляется на сервер и проверяется подлинность ПО в регуляторах.1) Нажимаем Flash BLHelli
2) Выбираем версию прошивки
3) Нажимаем ОК
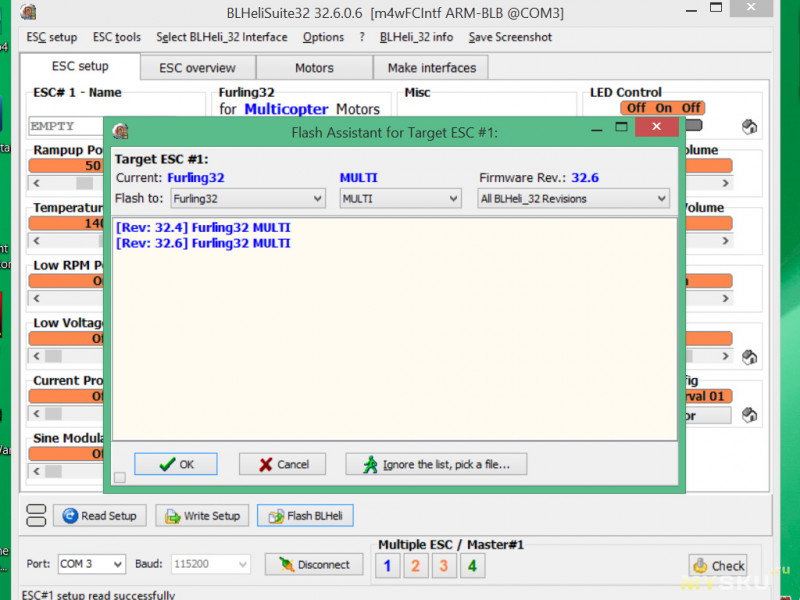
От себя я рекомендую прошиться последней версией, так как у меня на версии 32.4 был небольшой рассинхрон в работе, после прошивки проблема исчезла.
1) Припаиваем провода телеметрии на любой Uart порт к пину Rx.
2) Открываем конфигуратор и идём во вкладку Ports, находим наш Uart порт и в графе Sensor Input выставляем ESC.
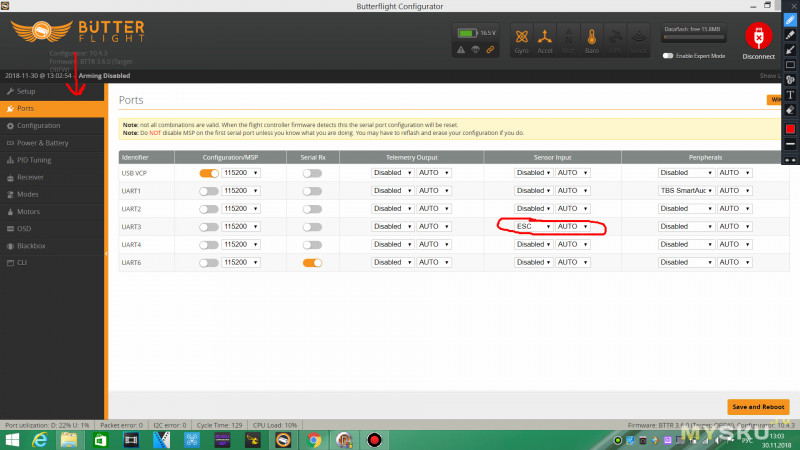
3) Вкладка Configuration. Активируем пункт ESC_SENSOR.
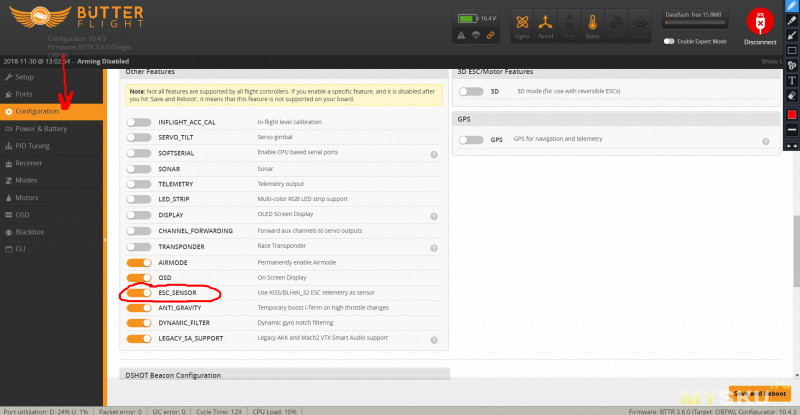
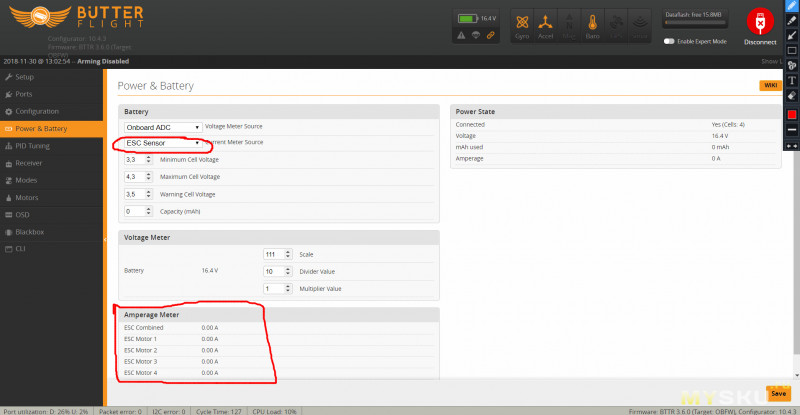
Как бы и всё :) Телеметрия работает. Но я покажу дополнительно какие пункты нужно поменять что бы была возможность получать показания ампеража.
Вкладка Power & Battery, выбираем параметр ESC Sensor, после чего в окошке снизу будет показания ампеража в сумме и отдельно по каждому регулятору.
Дальше уже на свой вкус во вкладке OSD можно активировать необходимые пункты такие как: обороты, температура, напряжение. И расставить по экрану как хотите.
P.S. это работает только на ПК которые имею плату ОСД на борту, но таких щас большинство.
Этапы сборки и полёт
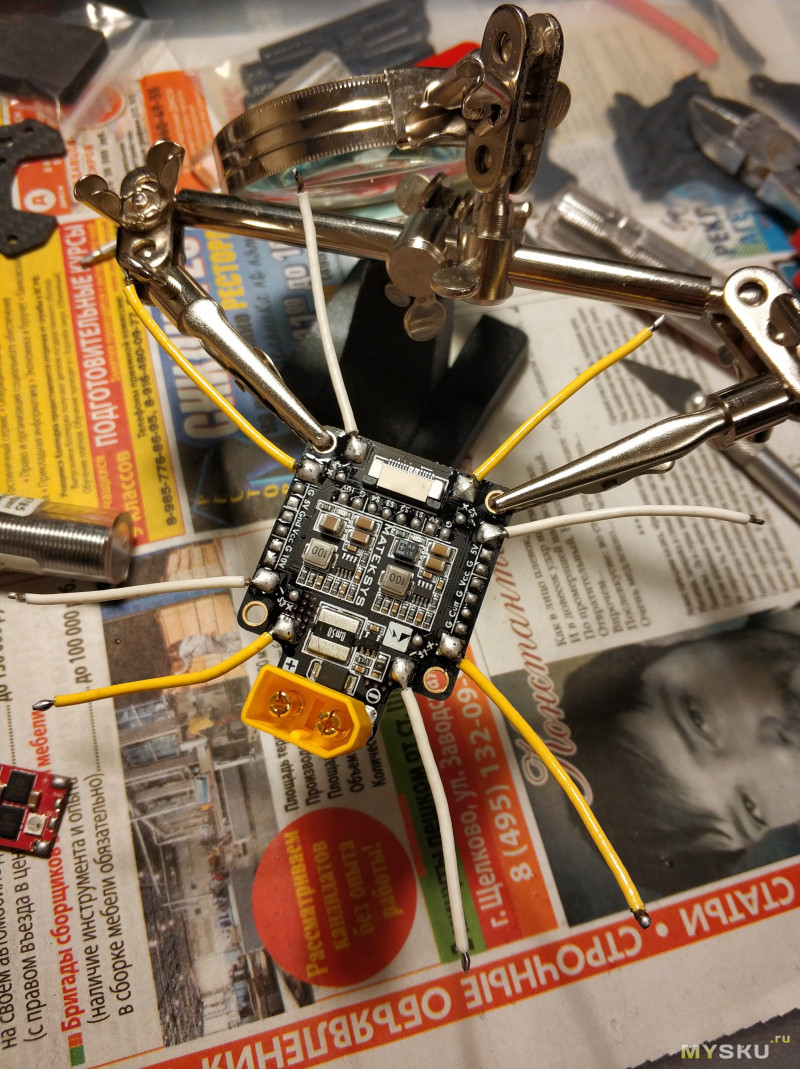
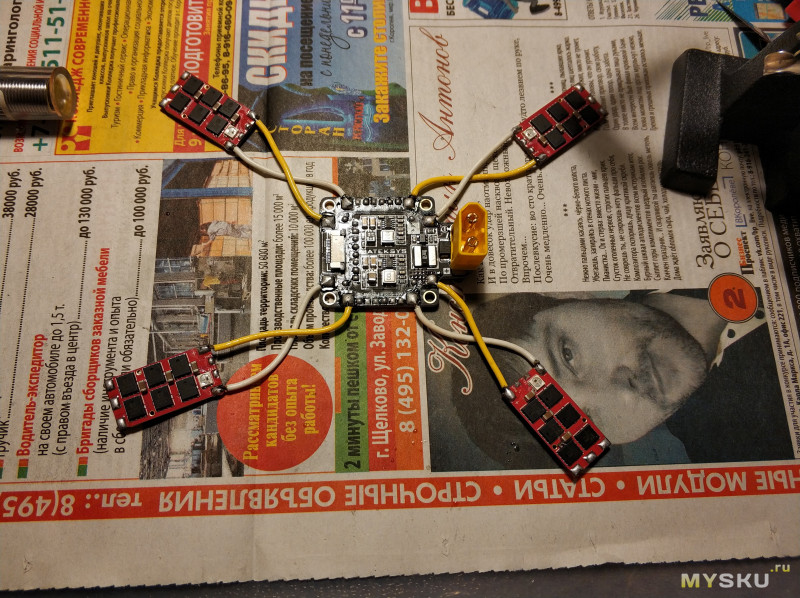

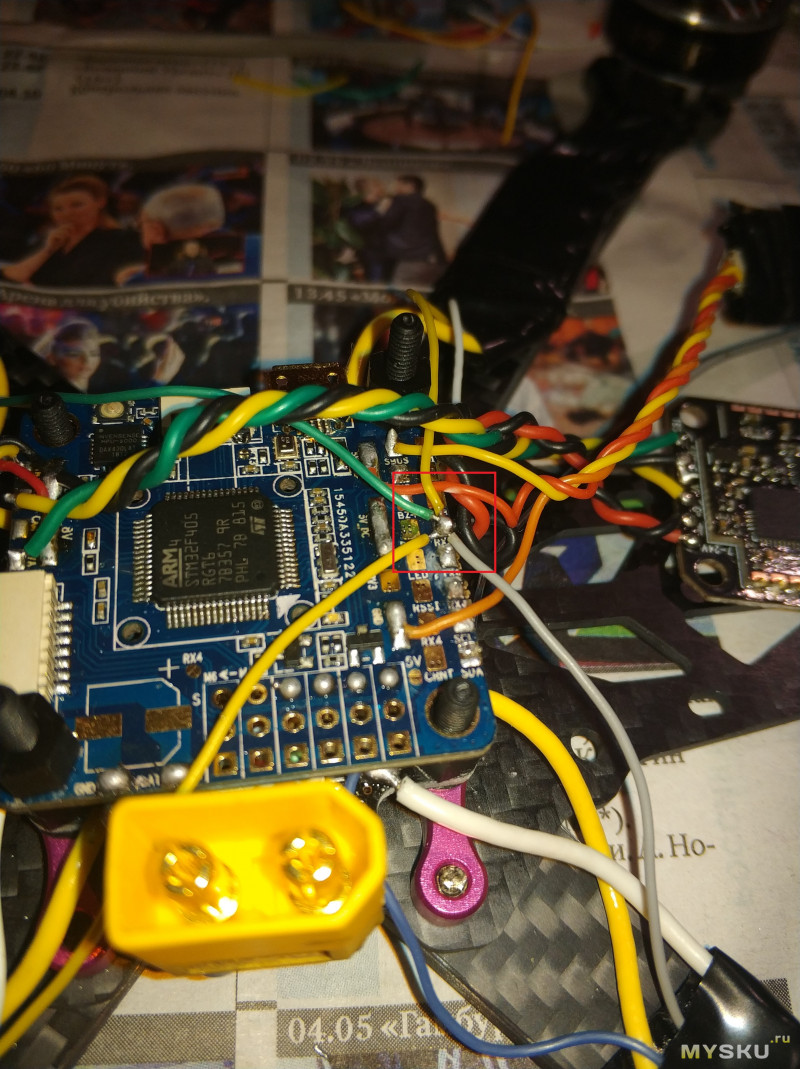
Тут показано место куда припаяны провода телеметрии с регуляторов.
Так в итоге выглядит квадрокоптер. Но это не финальное фото, тут не хватает антенн видео передатчика и приёмника РУ.


К сожалению не весь материал у меня есть на руках по этому если кому то интересно, то предлагаю посмотреть видео где есть кадры с данного дрона. Все кадры с солнышком и с синим небом как раз сняты на данный дрон :)
Кому не интересно смотреть начало, можете перематывать на 0:50.
| +47 |
3578
71
|
Сайт MYSKU.club cоздан для обзоров товаров, заказанных в зарубежных интернет-магазинах AliExpress, Amazon, Ebay и других.
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку.
Если Вы купили что-то полезное, то, пожалуйста, поделитесь информацией с другими.
Также у нас есть DIY сообщество, где приветствуются обзоры вещей, сделанных своими руками.
-
1026.32
Скидки и распродажи

-
445.39
AliExpress

-
273.05
DIY, или Сделай сам

-
187.28
Ebay

-
179.74
JD.ru

-
155.08
Магазины Китая

-
98.02
Новости сайта

-
77.49
Другие магазины
-
71.57
Магазины России и СНГ

-
68.46
TaoBao

-
kvv12 → Набор мини инструмента Kraftool X-Drive 27970-H38 (38шт.): трещотка 1/4", биты, торцевые головки, переходники
-
maxik → Гейзерная кофеварка Pedrini как бюджетная альтернатива Bialetti
-
topolys → 3Д принтер FLASHFORGE Adventurer 5M за 26320 рублей
-
Ant122 → Модернизация мультиметра: вместо "кроны" питание от аккумулятора старого смартфона.
-
Monter → Прибор для измерения сопротивления аккумуляторов (миллиомметр) YR1035+ из РФ (3975 ₽)
-
RONIN → Новая жизнь сверлильного станка. Делаем удобное управление
-
vovoshka → Доработка зарядного устройства Liitokala lii-402 с type-C входом
-
carmusic → Паяльник на 60Вт с керамическим нагревателем и регулировкой температуры, по акции за 189р. Небольшой обзор с разборкой.
Припой страшный, возьмите себе Asahi либо Felder в наших магазинах, в чип и дипе например.
Начало у ралли какое-то не ралли, а поездка, с середины видео уже поинтересней будет.
Начинка такая
Моторы geprc 2306 2450kv
Регуляторы furling 32
Камера xat 600m (линза 2,5)
Приемник r12dsm (radiolink)
Рама geprc GEP-MARK2-6
Видеопередатчик AKK FX3-ultimate
Плата распределения питания Matek Systems FCHUB-6S PDB
Полётный контроллер OMNIBUS F4 V6
Антенна видеопередатчика FOXEER Lollipop
Врайты сам не использовал лично.
Давайте называть вещи своими именами: в данном устройстве стоит 32-битный микроконтроллер фирмы GigaDevice с архитектурой ARM на ядре Cortex-M4 (серия F3xx), в отличие от чуть более старых микроконтроллеров серии F1xx на ядре Cortex-M3. В Cortex-M4 добавлены команды для цифровой обработки сигналов (DSP), что потенциально может увеличить скорость обработки сигналов от внешних датчиков.
Видосы с тех же гонок ниже, понятно что там скорости другие, но часто скорость квадрика используют для быстрой смены ракурса и позиции, а у вас летит медленно и со всеми.
Тут видно как квадрик будто гвоздем прибит к машинам на скорости 150+кмч
И возможно фантом может так, но стоит больше, разбить не дай бог жалко, рядом с машиной не полетишь из под которой летит грязь и пыль.
На вкус и цвет как говорится.
Но гоночному такие моменты ерунда, да и все таки спокойнее душе, так как знаешь что не 60 тысяч рублей в воздухе.
Если же все покупать, думаю в 15-17 уложится можно, а может и дешевле если поискать места где подешевле продают. К примеру раму я на распродаже взял на 700р дешевле чем обычно.
Например:
github.com/esden/open-bldc
github.com/pekkaroi/bldc-drive
По-моему, это уже какие-то разводки покупателя наподобие пикселей в смартфонах.
Не лучше ли просто поставить мосфеты более качественные чтобы не выгорали постоянно.
А обрабатывать согласен, пока что мало чего. В будущем возможно новые протоколы передачи данных, или же ещё более высокая частота переключения фаз мотора.
Что-топохожее от другого производителя.
Да и слишком мощный он для хилого движка HDD
Проще поставить что-то типа этого
https://aliexpress.com/item/item/DC-5-12-2A-15/32849817264.html
Горят-перепробовал 3-4 вида с али, все сгорели при повышении оборотов.
В софте есть интересная закладка «Make Interfaces», а внутри «Make Arduino Interface Boards» и вижу там поддержку модулей Ардуино, их прошивку… А для чего это?
Спасибо.
ЗЫ. Сам лично я через Ардуино не подключался.
Спасибо.
— тогда нулевое положение у вас будет среднее положение газа (соответственно и активироваться регулятор у вас будет в этом положении), максимальная скорость — на максимуме газа, а максимальная скорость назад — при нулевом положении ручки газа.
Если честно, меня больше интересует режим что в среднем положении ручки — мотор не работает.
Соответственно в верхнем Максимум в одну сторону, а в нижнем — максимум в обратную.
А скажите, я могу AFRO 12A — перепрошить в BlHELI и пользоваться потом тулзой на скриншоте вашем?
На версии BLHeliSuite_32 ПО не хотело видеть ESC через AFRO USB Programmer, а версия BLHeliSuite16.7.14.9.0.1 — таки прошила AFRO 12A в режим бидирект.
То что хотелось!
Еще раз благодарю.
Потом будут по крупнее и моторы и регулятор.
Ну квадрик 250 размера перегруженный на них летал же.
И вот вы, я все сделал по вашим советам. Оно — работает! Могу и видеопруф записать, но сомневаюсь что интересно.
Только зарегистрированные и авторизованные пользователи могут оставлять комментарии.